Дано:
Прямой круговой конус с углом  при вершине катится по неподвижной плоскости без скольжения делая n оборотов в минуту около вертикальной оси
при вершине катится по неподвижной плоскости без скольжения делая n оборотов в минуту около вертикальной оси  . Высота конуса — h.
. Высота конуса — h.
Определить:
1. Алгебраические величины проекций угловых скоростей прецессии и ротации на оси  и
и  , соответственно, а также мгновенную угловую скорость конуса.
, соответственно, а также мгновенную угловую скорость конуса.
2. Угловое ускорение конуса.
3. Скорости точек B и C.
4. Ускорение точки B, а также осестремительное и вращательное, нормальное и касательное ускорения точки C.
 h = 20cm; n = 120 об./мин.
h = 20cm; n = 120 об./мин.
Решение:
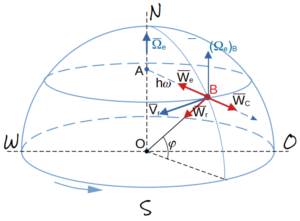
1. Точка O — неподвижная точка конуса — начало отсчёта главной  и подчинённой
и подчинённой  координатных систем; — ось прецессии, — ось ротации.
координатных систем; — ось прецессии, — ось ротации.
2. Определить угловые скорости прецессии  и ротации
и ротации  , мгновенную угловую скорость
, мгновенную угловую скорость  и мгновенную ось вращение
и мгновенную ось вращение  .
.
![\[ \overline\omega=\overline\omega_\psi + \overline\omega_\varphi + \overline\omega_\theta \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-5002cfe65b06dbaec77745889d60c2f2_l3.svg "Rendered by QuickLaTeX.com")
 , так как
, так как  — константа
— константа
 — угловая скорость нутации, — угол нутации, тогда
— угловая скорость нутации, — угол нутации, тогда
![\[ \overline\omega=\overline\omega_\psi + \overline\omega_\varphi, \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-9df7415aea614621123a860194b17ac4_l3.svg "Rendered by QuickLaTeX.com")
определить угловую скорость прецессии по заданному числу оборотов  .
.
![\[ \omega_\psi = \frac{2\Pi \cdot n_\psi }{60} = \frac{2\Pi \cdot 120 }{60} = 4\Pi (sec^{-1}) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-ada8e948a2ac7d35f037f50e78a07e65_l3.svg "Rendered by QuickLaTeX.com")
 оси
оси  оси
оси
векторное равенство на рисунке.
применим теорему синусов
![\[ frac{\omega_\psi}{\sin 60^o} = \rac{\omega_\varphi}{\sin 90^o} = \frac{\omega}{\sin 30^o}, \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-3ae322746105559809f62bcffb1d9800_l3.svg "Rendered by QuickLaTeX.com")
тогда:
![\[ \omega_\varphi = \frac{\omega_\psi \cdot \sin 90^o}{\sin 60^o} = \frac{\omega_\psi \cdot 1 \cdot 2}{\sqrt{3}} = \frac{8\Pi}{\sqrt{3}} \approx 14.5 (sec^{-1}), \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-f7e8cbb97a5ac11abc9deaf5c71c83a7_l3.svg "Rendered by QuickLaTeX.com")
![\[ \omega = \omega_\psi \frac{\sin 30^o}{\sin 60^o} = \frac{4\Pi \cdot 0.5 \cdot 2}{\sqrt{3}} \approx 7.26 (sec^{-1}). \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-5b2a2f6e7e76e380a7bed6e3ee080620_l3.svg "Rendered by QuickLaTeX.com")
Проверим, выполняются ли условия регулярной прецессии:
![\[ \theta = ( \vec{Ox}; \vec{O\varepsilon} ) = 330^o = const_1 \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-e35a91ea2dcf2e2de02d9268dfd775f7_l3.svg "Rendered by QuickLaTeX.com")
![\[ \omega_\psi = 4\Pi \; sec^{-1} = const_2 \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-64572f476c7877187857dcbba97dd076_l3.svg "Rendered by QuickLaTeX.com")
![\[ \omega_\varphi = 7.26 \; sec^{-1} = const_3 \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-e03d9ce1ab0a36e733499f03d8f10e2d_l3.svg "Rendered by QuickLaTeX.com")
3. В случае регулярной прецессии угловое ускорение конуса  является закреплённым вектором в точке O и определяется по формуле:
является закреплённым вектором в точке O и определяется по формуле:
![\[ \overline \varepsilon = \left[ \overline\omega_\psi \times \overline\omega \right]; \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-0da847ce9ce3138ae436e41de04d89ce_l3.svg "Rendered by QuickLaTeX.com")
![\[ \vert\overline\varepsilon\vert = \vert\overline\omega_\psi\vert\; \vert\overline\omega\vert\; \vert\sin( \overline\omega_\psi ; \overline\omega)\vert = 4\Pi \cdot 7.26 \approx 91.2\;(sec^{-2}); \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-1ffe803977ed736eb459ec6f38928538_l3.svg "Rendered by QuickLaTeX.com")
![\[ \sin( \overline\omega_\psi ; \overline\omega) = \sin 90^o = 1. \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-68b241cc4cf88b7dbda383f1f0f66b7e_l3.svg "Rendered by QuickLaTeX.com")
Комментарий: По правилу векторного произведения (см.рис) вектор  .
.
4. Определить скорости точек B и C конуса по формуле
![\[ \overline V_B = [ \overline\omega \times \overline r ] \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-795108b60869ff5ef8e7e36e66beba70_l3.svg "Rendered by QuickLaTeX.com")
![\[ \vert \overline V_B \vert = \omega \cdot h_{B\omega}, \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-5eaeef11638007ef65dfba2bab45e4f0_l3.svg "Rendered by QuickLaTeX.com")
![\[ h_{B\omega} = \vert \overline{BK} \vert = \vert \overline{OB} \vert \cdot \sin 60^o; \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-11166ac6e42ac4f0b61451518bbdc3e8_l3.svg "Rendered by QuickLaTeX.com")
![\[ \vert \overline{OB} \vert = \frac{h}{\sin 30^o} = \frac{20}{0.5} = 40\;(cm) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-5a15f8fed3f40dd615a130c5ada6a210_l3.svg "Rendered by QuickLaTeX.com")
![\[ h_{B\omega} = 40 \cdot \frac{\sqrt{3}}{2} = 20 \cdot \sqrt{3} \approx34.6\; (cm) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-b094e748590774e1423848ba2dda7824_l3.svg "Rendered by QuickLaTeX.com")
![\[ \vert \overline{V_B} \vert = 7.26 \cdot 34.6 \approx 251 \; \left(\frac{cm}{sec}\right) \approx 2.51 \left(\frac{m}{sec}\right). \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-f160d4371c36a667d9cf837615f02e07_l3.svg "Rendered by QuickLaTeX.com")
Комментарий: По правилу векторного произведения (см.рис.) 
![\[ \vert \overline{W_B} \vert = \sqrt{ \vert \overline{W_B^{bp}} \vert^2 + \vert \overline{W_B^{oc}} \vert^2 - 2 \vert \overline{W_B^{bp}} \vert \cdot \vert \overline{W_B^{oc}} \vert \cdot \cos \left( \overline W_B^{bp} ; \overline W_B^{oc} \right) } \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-3e5279ec82277777b7785a543ffa2a52_l3.svg "Rendered by QuickLaTeX.com")
![\[ \cos \left( \overline W_B^{bp} ; \overline W_B^{oc} \right) = \cos 120^o = -\sin 30^o = - \frac{1}{2}, \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-580e4232f4406bac7bdad99dbc8aae11_l3.svg "Rendered by QuickLaTeX.com")
тогда
![\[ \vert \overline{W_B} \vert = \sqrt{ \vert \overline{W_B^{bp}} \vert^2 + \vert \overline{W_B^{oc}} \vert^2 + 2 \vert \overline{W_B^{bp}} \vert \cdot \vert \overline{W_B^{oc}} \vert \cdot 0.5 } = \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-beee9f387d3936c2d4e62089bd8985e1_l3.svg "Rendered by QuickLaTeX.com")
![\[ \sqrt{36.5^2 + 18.2^2 + 2 \cdot 36.5 \cdot 18.2 \cdot 0.5 } = \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-f99acb872f5dd9641b326becf441ec3c_l3.svg "Rendered by QuickLaTeX.com")
![\[ \sqrt{ 1332 + 331 + 664 } = 48.2 \left(\frac{m}{cm^2}\right) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-bf9d54e01b501c0a6fa8526913c05659_l3.svg "Rendered by QuickLaTeX.com")
4.1 Так как точка C  оси ротации
оси ротации  , то ускорение точки C можно определить по формуле:
, то ускорение точки C можно определить по формуле:
![\[ \overline W_C = \overline W_{C\eta} + \overline W_{C\tau}, \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-d2523b504e62829283b4d012d4d97496_l3.svg "Rendered by QuickLaTeX.com")
где
 — нормальное и касательное ускорения точки C, соответственно.
— нормальное и касательное ускорения точки C, соответственно.
![\[ \vert\overline W_{C\eta}\vert = \frac{V_C^2}{\vert\overline{CN}\vert}; \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-91bce21c798643d239fa047db35f71e1_l3.svg "Rendered by QuickLaTeX.com")
![\[ \vert\overline{CN}\vert = h \cdot \sin 30^o = \frac{h}{2} = 20 \cdot \frac{1}{2} = 10\;(cm) = 0.1\;(m) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-88f0c2a62e12266ad2a763af0e3bfafa_l3.svg "Rendered by QuickLaTeX.com")
 так как
так как
![\[ \vert \overline W_{C\tau} \vert = \plusminus \vert \frac{d\overline V_C}{dt} \vert = 0, \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-1fda67e1be3df38e47047a36bef66020_l3.svg "Rendered by QuickLaTeX.com")
так как  , тогда
, тогда  ;
;
Комментарий:  , так как
, так как  (см.рис.)
(см.рис.)
4.2 Определить осестремительное ускорение точки C.
![\[ \overline W_C^{oc} = \left[ \overline\omega \times \overline V_C \right] = \left[ \overline\omega \times \left[ \overline \omega \times \overline r \right] \right] = \left[ \overline\omega \times \left[ \overline \omega \times \vec{OC} \right] \right]; \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-ef4d0f83d1ed6f218f73e2070c76b32d_l3.svg "Rendered by QuickLaTeX.com")
![\[ \vert \overline W_C^{oc} \vert = \omega^2 \cdot h_{C\omega} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-5b118e7b8dc5c62ddaa5cc69be791f46_l3.svg "Rendered by QuickLaTeX.com")
![\[ h_{C\omega} = \vert \overline{CP} \vert = \vert \overline{OC} \vert \cdot \sin 60^o = \frac{20\cdot\sqrt{3}}{2} = 10\cdot\sqrt{3}\;(cm) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-5c9576278f8005cf14de741830e7e0ca_l3.svg "Rendered by QuickLaTeX.com")
![\[ \vert \overline W_C^{oc} \vert = 7.26^2 \cdot 17.3 = 912\;(\frac{cm}{sec^2}) = 91.2\;(\frac{m}{sec^2}) . \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-988c4058043d17246242abf8c9b9337a_l3.svg "Rendered by QuickLaTeX.com")
Вращательно ускорение точки C:
![\[ \overline W_C^{bp} = \left[ \overline\varepsilon \times \vec{OC} \right]; \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-22e67baa32a96a25c0d5e21cf13730c4_l3.svg "Rendered by QuickLaTeX.com")
![\[ \vert \overline W_C^{bp} \vert = \vert\overline\varepsilon\vert \cdot h_{C\varepsilon} = \vert\overline\varepsilon\vert \cdot \vert\overline{OC} \vert = 91.2 \cdot 10 = 912\;(\frac{cm}{sec^2}) = 91.2\;(\frac{m}{sec^2}) . \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-ffb05f39315f7d2e350f9b0888e2af70_l3.svg "Rendered by QuickLaTeX.com")
Комментарий: 
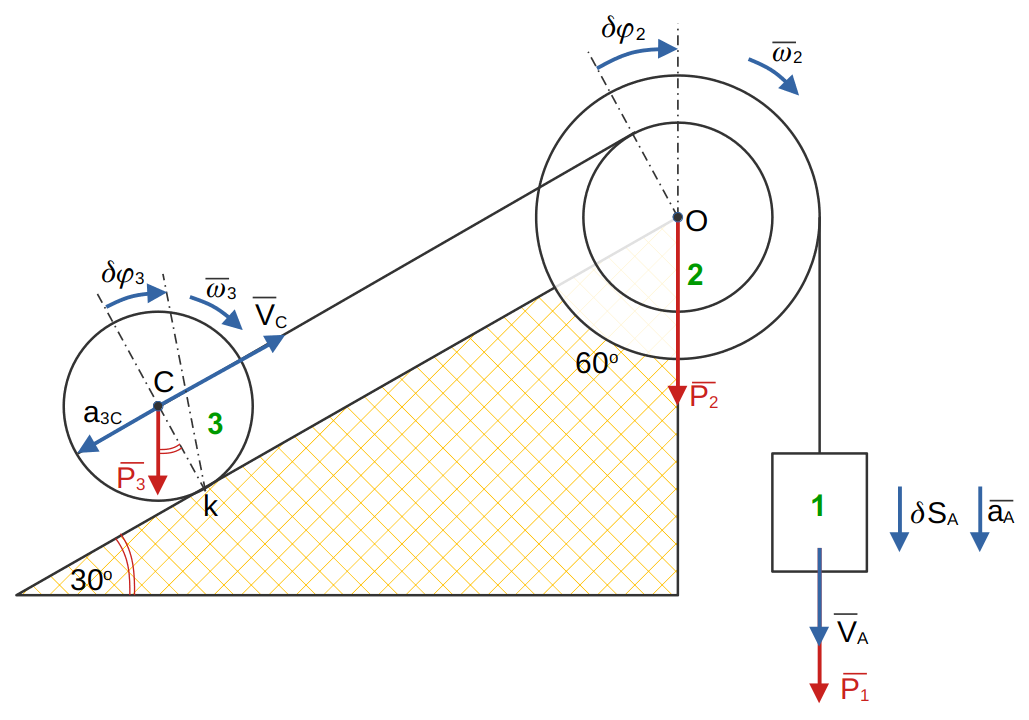
 2 Блог 2-ступенчатый однородный цилиндр радиусов
2 Блог 2-ступенчатый однородный цилиндр радиусов  с моментом инерции относительно оси симметрии
с моментом инерции относительно оси симметрии  .
. .
.



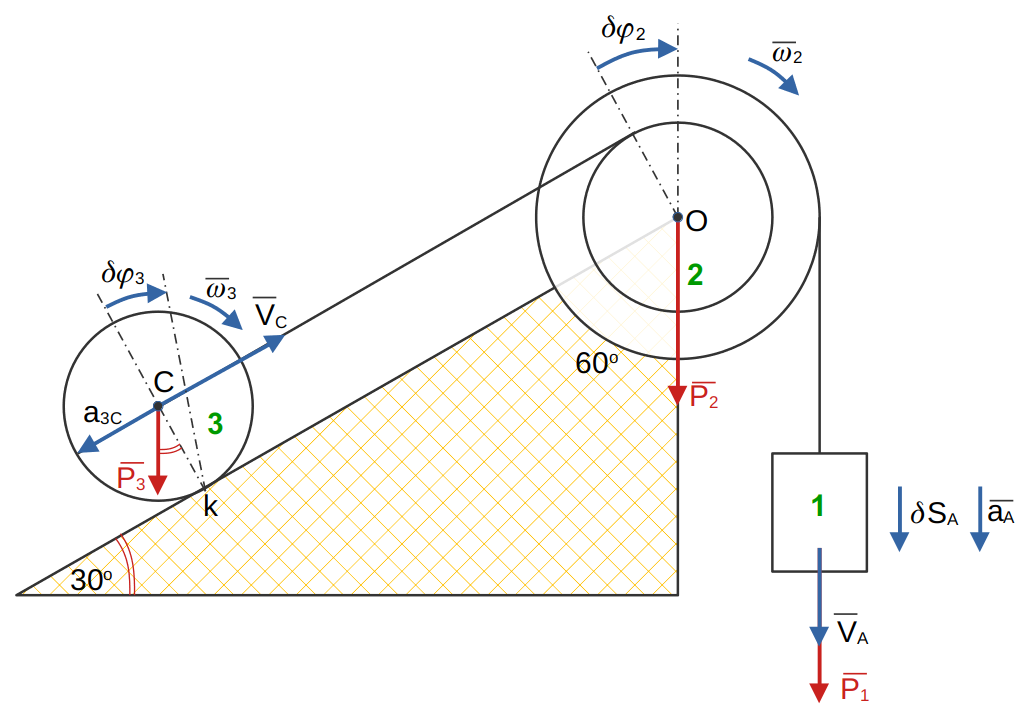


 (кинетостатика)
(кинетостатика)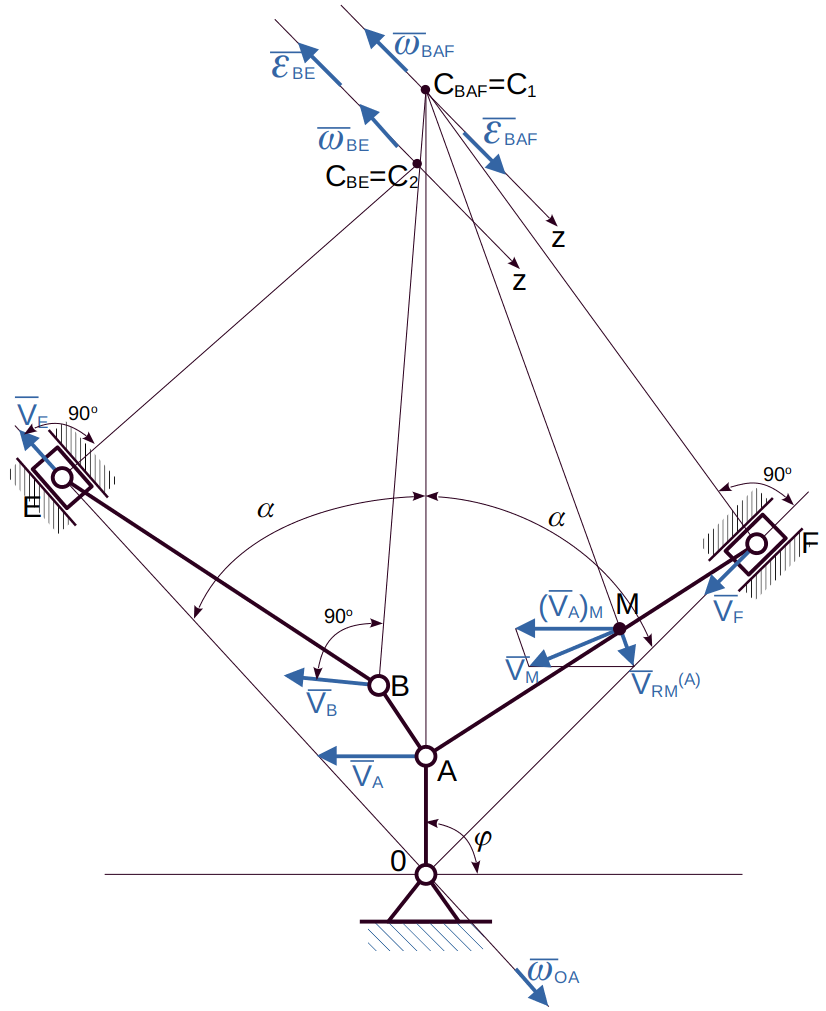

 (коэффициент трения скольжения)
(коэффициент трения скольжения)


 (натяжение нити)
(натяжение нити)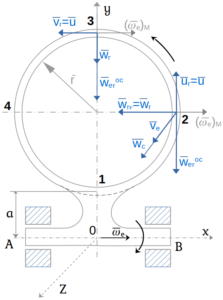 Полое кольцо радиуса r жестко соединено с валом АВ, и притом так, что ось вала расположена в плоскости оси кольца. Кольцо заполнено жидкостью, движущейся в нем в направлении стрелки часов с постоянной относительной скоростью U.
Полое кольцо радиуса r жестко соединено с валом АВ, и притом так, что ось вала расположена в плоскости оси кольца. Кольцо заполнено жидкостью, движущейся в нем в направлении стрелки часов с постоянной относительной скоростью U.



 Дано:
Дано:


 Дано:
Дано:







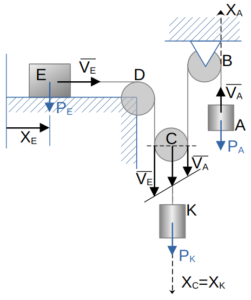
 (методом вырезания узлов);
(методом вырезания узлов); — (методом Риттера),
— (методом Риттера), .
.