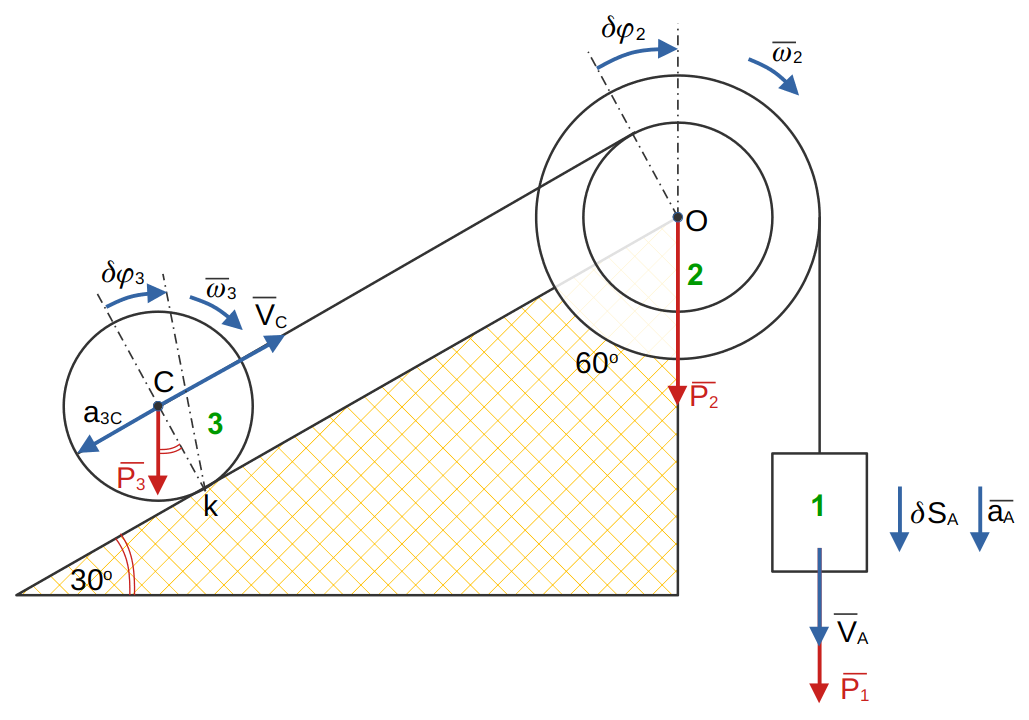
Движение системы, которое начинается из состояния покоя, происходит под действием силы тяжести тела 1.
Массы тел 1,2,3, соответственно, равны  2 Блог 2-ступенчатый однородный цилиндр радиусов
2 Блог 2-ступенчатый однородный цилиндр радиусов  с моментом инерции относительно оси симметрии
с моментом инерции относительно оси симметрии  .
.
Каток 3 — однородный цилиндр радиуса  .
.
Тела считать абсолютно твердыми а нити — абсолютно нерастяжимыми и невесомыми.
Найти ускорение центра тяжести тела 1 с помощью Общего Уравнения Динамики (ОУД), а также натяжение нитей.
Трением блока 2-3 о наклонную плоскость пренебречь.
Дано:



Определить:

Решение:
1. Возьмём за обобщённую координату  , тогда
, тогда
 — обобщённая скорость
— обобщённая скорость
2. Определим кинетическую энергию системы в виде функции обобщённой скорости  :
:
(1) 
Груз 1 совершает поступательное движение:
(2) 
Ступенчатый цилиндр 2 вращается около неподвижной оси OZ:
(3) 
Цилиндр 3 совершает плоско-параллельное движение (без проскальзывания):
(4) 
Кинематические соотношения системы:
![\[ \omega_2 = \frac{V_A}{R_2} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-00171e9dbcc5950353e57c7653553d5c_l3.svg "Rendered by QuickLaTeX.com")
![\[ \omega_3 = \frac{V_C}{R_3} \;\; : \;\; \frac{V_C}{V_A} = \frac{r_2}{R_2} \;\; \rightarrow \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-a585001157c8c8e1a8cb1931dbdca384_l3.svg "Rendered by QuickLaTeX.com")
![\[ V_C = V_A \frac{r_2}{R_2} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-2440da6ba73d368272e25f4162ce1694_l3.svg "Rendered by QuickLaTeX.com")
![\[ \omega_3 = \frac{r_2}{R_3 \cdot R_2} \cdot V_A \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-08edae092c87addda3785301a9fd94f5_l3.svg "Rendered by QuickLaTeX.com")
3. Запишем (1) с учётом (2) — (4) и кинематических соотношений, получим,
обозначив  , (где
, (где  — приведённая масса системы)
— приведённая масса системы)
(5) ![\begin{equation*} \begin{split} T= \frac{m_1}{2}\cdot V_A^2 + \frac{J_2}{2R_2^2}\cdot V_A^2 + \frac{m_3}{2}\left(\frac{r_2}{R_2} \right)^2 \cdot V_A^2 = \\ = \frac{1}{2} \left[ m_1 + \frac{J_2}{2R_2^2} + \frac{m_3}{2}\left(\frac{r_2}{R_2} \right)^2 \right] V_A^2 \end{split} \end{equation*}](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-76207c74792e7cbc5627f3b3d3ffde16_l3.svg "Rendered by QuickLaTeX.com")
4. Составим уравнение Лагранжа 2-го рода:
(6) 
![\[ m^* = \left[ m_1 + \frac{J_2}{2R_2^2} + \frac{m_3}{2} \left( \frac{r_2}{R_2} \right)^2 \right] \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-7fc8eb64c55493891ce7722922e6ecfe_l3.svg "Rendered by QuickLaTeX.com")
![\[ \frac{\partial T}{\partial S_A} = 0; \;\;\; \frac{\partial T}{\partial V_A} = m^*V_A; \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-30675bd74e0f40526dcf14240e2508ed_l3.svg "Rendered by QuickLaTeX.com")
![\[ \frac{d}{dt} \left[ \frac{\partial T}{\partial V_A} \right] = m^* \cdot \frac{dV_A}{dt} = m^* \cdot a_1, \;\;\;\left( a_1=\frac{dV_A}{dt} \right) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-04f4c508a151a46d2f6457a5ab08ef24_l3.svg "Rendered by QuickLaTeX.com")
5. Определить обобщённую силу, соответствующую выбранной обобщённой координате :
Запишем выражение для элементарной (виртуальной) работы сил, не зависящих от ограничений и сил сопротивления.
![\[ \delta A^e = m_1g \cdot \delta S_A - m_3 \sin 30^o \cdot g \delta S_{3C} = \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-3e5ffe043711110ecd49e362d5522f18_l3.svg "Rendered by QuickLaTeX.com")
подставим значения кинематических соотношений
![\[ \delta S_{3C} = \frac{r_2}{R_2} d S_A \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-9fc3820485e804eca66c1531d0c5c060_l3.svg "Rendered by QuickLaTeX.com")
а именно:
![\[ \begin{split} \delta A^e = m_1g \cdot dS_A - m_3g \cdot \sin 30^o \cdot \frac{r_2}{R_2} dS_A =\\ = g \left( m_1 - \frac{m_3 \cdot r_2}{2R_2} \right) \cdot dS_A \end{split} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-8d60a78aac906f9cbf9531f5ab150adc_l3.svg "Rendered by QuickLaTeX.com")
Тогда, так как  , то
, то
 — обобщённая сила — правая часть уравнения (6)
— обобщённая сила — правая часть уравнения (6)
5. Соединим левую и правую части уравнения (6):
 , тогда
, тогда 
![\[ a_1 = a_A = \frac{ \left( m_1 - \frac{m_3}{2} \frac{r_2}{R_2} \right) g }{ m_1 + \frac{J_2}{R_2} + \frac{3}{2} m_3 \left( \frac{r_2}{R_2} \right)^2 } \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-b9f3113b0ea5941b91b228939e66264a_l3.svg "Rendered by QuickLaTeX.com")
— ускорение тела 1.
Примечание: Сравнить с решением задачи 13.1