Решить задачу (6.4) с учётом силы сопротивления воздуха движению, пропорциональной скорости тела.  , где m — масса тела, k — постоянный коэффициент (k>0).
, где m — масса тела, k — постоянный коэффициент (k>0).
Дано:


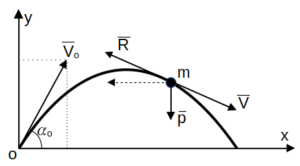
Определить: y=f(x) — уравнение траектории точки
Запишем векторное уравнение динамики материальной точки
(1) 
(2) 
 (
(  ),
),  (
(  и направлены противоположно )
и направлены противоположно )
(3) 
(4) 
Подставим (4) в (2) и (3), получим
(5) 
(6) 
Так как  , то сокращая на m, получим
, то сокращая на m, получим
(7) 
(8) 
Далее решаем по отдельности уравнения (7) и (8).
Для уравнения (7), которое теперь запишем в виде
![\[ \frac{d\dot x}{dt} = -k \dot x \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-5b1d1a4240438289daa69c125aee1622_l3.svg "Rendered by QuickLaTeX.com")
Проинтегрируем, разделяя переменные 
 (постоянную
(постоянную  находим из начальных условий при
находим из начальных условий при  )
)

![\[ \ln \dot x = -kt + \ln \vert V_0 \cos \alpha_0 \vert \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-9c599529814db763cb00e9c408557f9f_l3.svg "Rendered by QuickLaTeX.com")
![\[ \ln \dot x - \ln \vert V_0 \cos \alpha_0 \vert = -kt \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-9965a28cb10268aa2577f0764cc2d080_l3.svg "Rendered by QuickLaTeX.com")
![\[ \ln \frac{\dot x}{V_0 \cdot \cos \alpha_0} = -kt \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-34b21f59f3739becf74c75d48bae7eff_l3.svg "Rendered by QuickLaTeX.com")
Потенцируем и получим
![\[ \frac{\dot x}{V_0 \cdot \cos \alpha_0} = e^{-kt} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-b5863d70ace272e34bd05d6ff8ead0a9_l3.svg "Rendered by QuickLaTeX.com")
(9) ![\begin{equation*} \dot x = V_0 \cdot \cos \alpha_0 \cdot e^{-kt} \] \end{equation*}](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-c525320f52931c4ef7e52c61ed1edf8b_l3.svg "Rendered by QuickLaTeX.com")
Проинтегрируем второй раз, получим
![\[ \int dx = V_0 \cdot \cos \alpha_0 \int e^{-kt} \cdot dt \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-99cdda47d935f27f5846edaa47451648_l3.svg "Rendered by QuickLaTeX.com")
![\[ x = - \frac{V_0}{k} \cos \alpha_0 \cdot e^{-kt} + C_2 \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-f0928202348cd4be1d92c7a3a385bfe1_l3.svg "Rendered by QuickLaTeX.com")
(постоянную  находим из начальных условий при )
находим из начальных условий при )
![\[ 0 = - \frac{V_0}{k} \cos \alpha_0 + C_2 \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-041df5df3f8e3896bb3c0d09e81884f2_l3.svg "Rendered by QuickLaTeX.com")
![\[ C_2 = \frac{V_0}{k} \cos \alpha_0 \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-ca846a16e0939ad310fc741373d7da5b_l3.svg "Rendered by QuickLaTeX.com")
![\[ x = - \frac{V_0}{k} \cos \alpha_0 \cdot e^{-kt} + \frac{V_0}{k} \cos \alpha_0 \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-e4fdd6295a1fd0f3535be23b7e3ef665_l3.svg "Rendered by QuickLaTeX.com")
(10) ![\begin{equation*} x = - \frac{V_0}{k} \cos \alpha_0 ( 1 - e^{-kt} ) \] \end{equation*}](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-31e70c4b8cba388a25e8a4dd3e5eb5ae_l3.svg "Rendered by QuickLaTeX.com")
Для уравнения (8), которое теперь запишем в виде
![\[ \frac{d\dot y}{dt} = -k\dot y - g \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-ba57777602d3e916ca96ef7ca836f154_l3.svg "Rendered by QuickLaTeX.com")
Проинтегрируем
![\[ \int \frac{dy}{g+k\dot y} = - \int dt \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-d14f830fa582e3b67316cee81c492b4f_l3.svg "Rendered by QuickLaTeX.com")
(11) 
(постоянную  находим из начальных условий при )
находим из начальных условий при )
![\[ \ln(g+kV_0 \sin \alpha_0}) = C_3 \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-b67541bc7929ca944c3dc8a244c27fd3_l3.svg "Rendered by QuickLaTeX.com")
Подставляя в (11) значение , получим
![\[ \ln (g+k\dot y) = -kt + \ln(g+kV_0 \sin \alpha_0}), \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-e9e505e8fa2d6bd5ca3e1dd8c6fcba7e_l3.svg "Rendered by QuickLaTeX.com")
тогда
![\[ \ln \frac{g+k\dot y}{g+kV_0 \sin \alpha_0}} = -kt \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-d87825cc8cef06562e709e224b1e1045_l3.svg "Rendered by QuickLaTeX.com")
Потенцируем
![\[ \frac{g+k\dot y}{g+kV_0 \sin \alpha_0}} = e^{-kt} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-4c5f548ae412964ace85d01330422d77_l3.svg "Rendered by QuickLaTeX.com")
С помощью алгебраических преобразований получим выражение для 
![\[ g+k \dot y = ge^{-kt} + kV_0 \sin \alpha_0} \cdot e^{-kt} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-32f99aabdf4c6264a651d6af329ff04f_l3.svg "Rendered by QuickLaTeX.com")
(12) 
Интегрируем второй раз, получим
![\[ dy = \frac{1}{k} (g + kV_0 \sin \alpha_0) \cdot e^{-kt} \cdot dt - \frac{g}{k} \cdot dt \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-90d8811b492dd4655e52e272c8611fd1_l3.svg "Rendered by QuickLaTeX.com")
![\[ y = - \frac{1}{k^2} (g + kV_0 \sin \alpha_0) \cdot e^{-kt} - \frac{gt}{k} +C_4 \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-fa91ca984dd37b3d0af44f75fc05354c_l3.svg "Rendered by QuickLaTeX.com")
(постоянную  находим из начальных условий при )
находим из начальных условий при )
![\[ 0 = - \frac{1}{k^2} (g + kV_0 \sin \alpha_0) - 0 + C_4\]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-5ba0eb9104da5eaa818eb0b03e6d394e_l3.svg "Rendered by QuickLaTeX.com")
![\[ C_4 = \frac{1}{k^2} (g + kV_0 \sin \alpha_0) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-6959ef1f2d18fa9aa52937eef3d18074_l3.svg "Rendered by QuickLaTeX.com")
Подставляем в уравнение (12), получим
![\[ y = - \frac{1}{k^2} (g + kV_0 \sin \alpha_0) e^{-kt} - \frac{g}{k}t + \frac{1}{k^2} (g + kV_0 \sin \alpha_0) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-d7c5e18098c5dea1365b4f9918e1f885_l3.svg "Rendered by QuickLaTeX.com")

(13) 
Путём несложных преобразований, исключая из (10) и (13) параметр t, получим уравнение траектории точки в каноническом виде с учётом сопротивления движению:
(14) 
Примечание:
В предыдущей задаче №3.1.2 мы получили решение в случае ОТСУТСТВИЯ сопротивления движению — траекторией является Парабола. Здесь уравнение (14) представляет так называемую «баллистическую кривую», но вид ее также не зависит от калибра (массы) снаряда, а только от угла бросания и начальной скорости 