26.1 [Мещерский И.В. Задачи по теоретической механике. // Изд-во. «Лань», 2008]
В шахте равноускоренно опускается лифт массой m=280 кг. В первые 10 сек. он проходит 35 м. Найти натяжение каната, на котором висит лифт.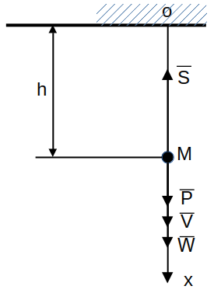
Вариант №21 (из сборника Колебания механических систем: пособие по выполнению РГР / Г.Т. Алдошин, Н.Н. Дмитриев и др..; Балт. гос.техн. ун-т.-СПб., 2016.- 79 с.)
Однородное зубчатое колесо массой «m» и радиусом «r» находится во внешнем зацеплении с неподвижным колесом радиуса  .
.
К оси подвижного колеса прикреплены две пружины (одинаковые), концы которых B и C расположены на горизонтальном диаметре неподвижного колеса. При  пружины находятся в свободном состоянии.
пружины находятся в свободном состоянии.
Пренебрегая весом кривошипа «ОА», определить:
является положением устойчивого равновесия. при нулевых начальных условиях если на кривошип действует момент  , где
, где  — период свободных колебаний системы.
— период свободных колебаний системы.Вариант №14 из сборника Колебания механических систем: пособие по выполнению РГР / Г.Т. Алдошин, Н.Н. Дмитриев и др..; Балт. гос.техн. ун-т.-СПб., 2016.- 79 с.)
Окружность радиусом R равномерно вращается с угловой скоростью  вокруг вертикальной оси O.
вокруг вертикальной оси O.
По окружности может скользить без трения материальная точка M, имеющая массу m.
 , если ось вращения окружности O движется поступательно вдоль оси
, если ось вращения окружности O движется поступательно вдоль оси  с постоянным ускорением w,а
с постоянным ускорением w,аРешить задачу (6.4) с учётом силы сопротивления воздуха движению, пропорциональной скорости тела.  , где m — масса тела, k — постоянный коэффициент (k>0).
, где m — масса тела, k — постоянный коэффициент (k>0).


№ 8.24 (Из сб. И,В. Мещерский «Задачи по теоретической механике»/ «Лань», 2008.,448 с.)
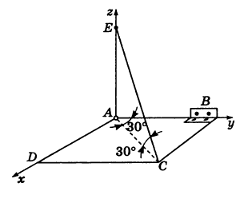 Однородная прямоугольная рама веса 200 Н прикреплена к стене при помощи шарового шарнира A и петли B и удерживается в горизонтальном положении веревкой CE, привязанной в точке C рамы и к гвоздю E, вбитому в стену на одной вертикали с A, причем ∠ECA=∠BAC=30°. Определить натяжение веревки и опорные реакции.
Однородная прямоугольная рама веса 200 Н прикреплена к стене при помощи шарового шарнира A и петли B и удерживается в горизонтальном положении веревкой CE, привязанной в точке C рамы и к гвоздю E, вбитому в стену на одной вертикали с A, причем ∠ECA=∠BAC=30°. Определить натяжение веревки и опорные реакции.





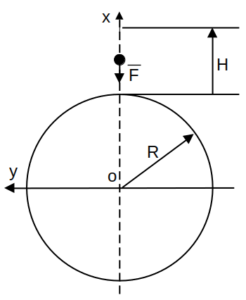 Определить, какую направленную вверх наименьшую скорость
Определить, какую направленную вверх наименьшую скорость  надо сообщить телу, чтобы оно поднялось на высоту H.
надо сообщить телу, чтобы оно поднялось на высоту H.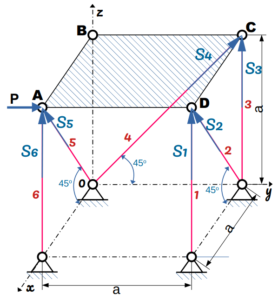




 плоскости
плоскости 
 плоскости
плоскости 
 плоскости
плоскости 













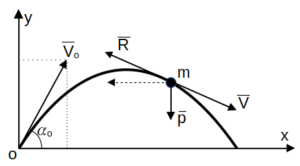
 к горизонту со скоростью
к горизонту со скоростью  . Определить уравнение траектории тела. Силами сопротивления пренебречь. Оси
. Определить уравнение траектории тела. Силами сопротивления пренебречь. Оси  изображены на рисунке.
изображены на рисунке.
