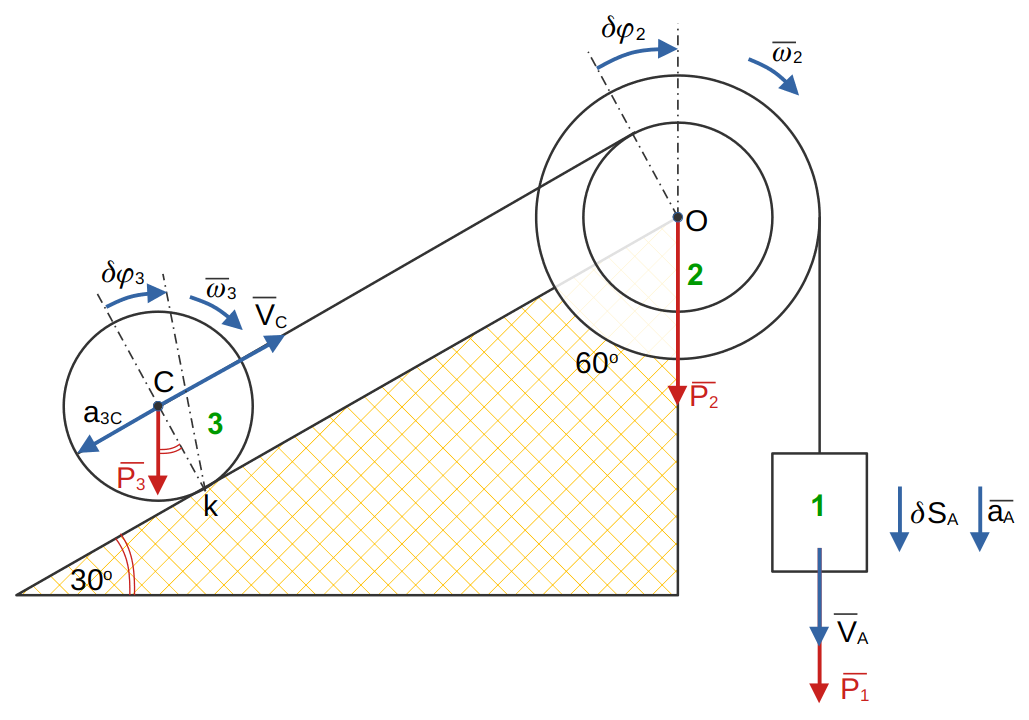
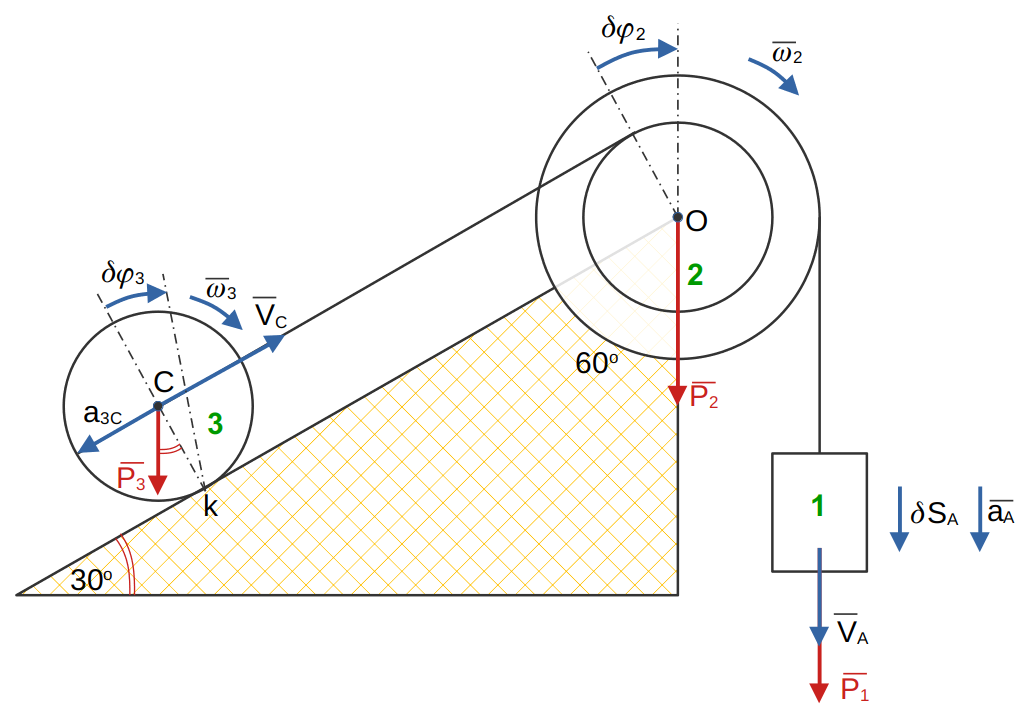
Движение системы, которое начинается из состояния покоя, происходит под действием силы тяжести тела 1.
Массы тел 1,2,3, соответственно, равны  2 Блог 2-ступенчатый однородный цилиндр радиусов
2 Блог 2-ступенчатый однородный цилиндр радиусов  с моментом инерции относительно оси симметрии
с моментом инерции относительно оси симметрии  .
.
Каток 3 — однородный цилиндр радиуса  .
.
Тела считать абсолютно твердыми а нити — абсолютно нерастяжимыми и невесомыми.
Найти ускорение центра тяжести тела 1 с помощью Общего Уравнения Динамики (ОУД), а также натяжение нитей.
Трением блока 2-3 о наклонную плоскость пренебречь.
Дано:






 (кинетостатика)
(кинетостатика)

 (коэффициент трения скольжения)
(коэффициент трения скольжения)


 (натяжение нити)
(натяжение нити) .
. пружины находятся в свободном состоянии.
пружины находятся в свободном состоянии. , где
, где  — период свободных колебаний системы.
— период свободных колебаний системы. вокруг вертикальной оси O.
вокруг вертикальной оси O. , если ось вращения окружности O движется поступательно вдоль оси
, если ось вращения окружности O движется поступательно вдоль оси  с постоянным ускорением w,а
с постоянным ускорением w,а