Вариант №14 из сборника Колебания механических систем: пособие по выполнению РГР / Г.Т. Алдошин, Н.Н. Дмитриев и др..; Балт. гос.техн. ун-т.-СПб., 2016.- 79 с.)
Окружность радиусом R равномерно вращается с угловой скоростью  вокруг вертикальной оси O.
вокруг вертикальной оси O.
По окружности может скользить без трения материальная точка M, имеющая массу m.
Определить:
- Равновесные положения точки в ее движении относительно окружности;
- Устойчивость этих положений;
- Периоды свободных малых колебаний точки около устойчивых положений равновесия;
- Малые вынужденные колебания точки около устойчивого положения равновесия
 , если ось вращения окружности O движется поступательно вдоль оси
, если ось вращения окружности O движется поступательно вдоль оси  с постоянным ускорением w,а
с постоянным ускорением w,а
Решение
1. На точку действует сила сопротивления,  где
где  – скорость
– скорость
точки относительно окружности.
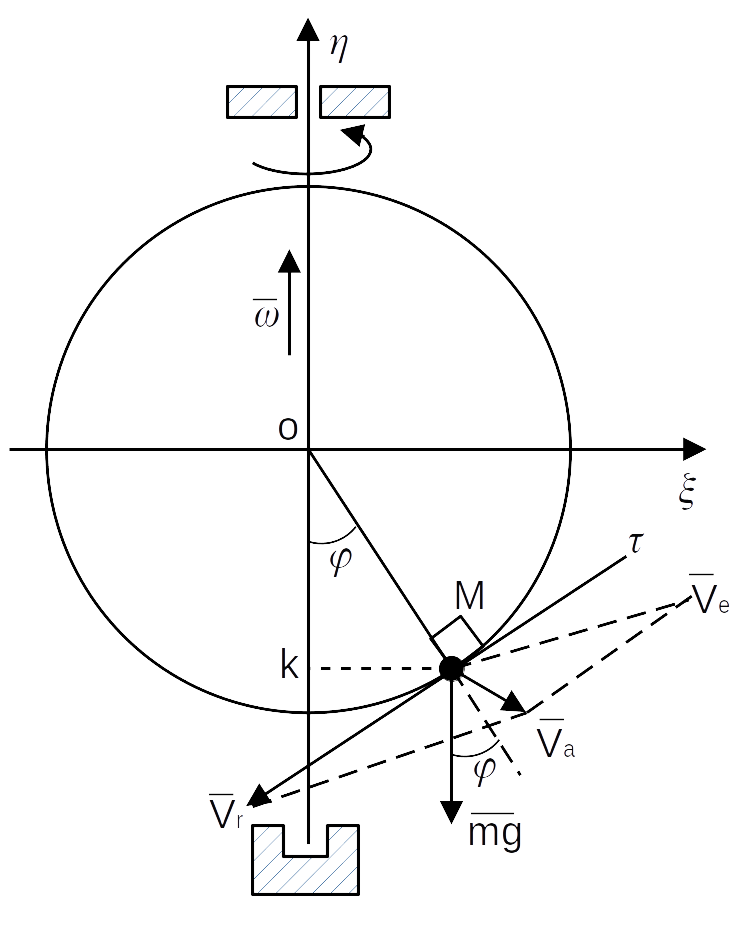
Примем за обобщённую координату  , где
, где  — обобщённая скорость. (Число степеней свободы равно 1)
— обобщённая скорость. (Число степеней свободы равно 1)
2. Определим кинетическую энергию системы.
 , но
, но  , т.к. масса окружности мала по сравнения с массой точки M.
, т.к. масса окружности мала по сравнения с массой точки M.

 — абсолютная скорость точки М относительно неподвижной оси
— абсолютная скорость точки М относительно неподвижной оси 
 , где
, где  — переносная скорость точки М.
— переносная скорость точки М.

 — плоскость окружности
— плоскость окружности
 — ,
— ,  принадлежит плоскости
принадлежит плоскости 
(1) 
 — расстояние до оси
— расстояние до оси
тогда  ;
; 
По теореме косинусов определим  .
.

(2) 
(3) 
3. Подставляя (3) в выражение для кинетической энергии, получим
(4) 
Используя (4), определим значение коэффициента квазиинерционности: 
(5) 
4.Теперь определим обобщенную силу Q, соответствующую выбранной обобщённой координате и учитывая, что действующие силы на точку М консервативные, используем зависимость
(6) 
обобщённую силу найдём из выражения для виртуальной работы
(7) 
для случая с одной степенью свободы.
 , то
, то
(8) 
Условие, из которого находим значение положения равновесия точки М:
(9) 
 , т.е.
, т.е. 
5. Проверим устойчивость положений равновесия по критерию Лагранжа-Дирихле:
 — положение равновесия устойчиво!
— положение равновесия устойчиво!
 — положение равновесия неустойчиво!
— положение равновесия неустойчиво!
 : найдём вторую производную от потенциальной энергии точки М и подставим в полученное выражение значения
: найдём вторую производную от потенциальной энергии точки М и подставим в полученное выражение значения 

(10) 
 ,
,  , устойчиво !!!
, устойчиво !!!
 — неустойчиво!
— неустойчиво!
Другой способ:

 — потенциальная энергия.
— потенциальная энергия.
 ;
;  ( см. выше )
( см. выше )
 (см. выше, далее так же)
(см. выше, далее так же)
Коэффициент квазиупругости:

6. Определить период малых колебаний
(11) 
— период малых свободных колебаний
при 
подставляем a и c в формулу (11) получим
(12) 
 ;
;
7. Рассмотрим вынужденные колебания точки М, если при этом на точку действует сила сопротивления. и сама окружность перемещается вдоль оси с ускорением W=const.
(13) 
(см. рис. 2)
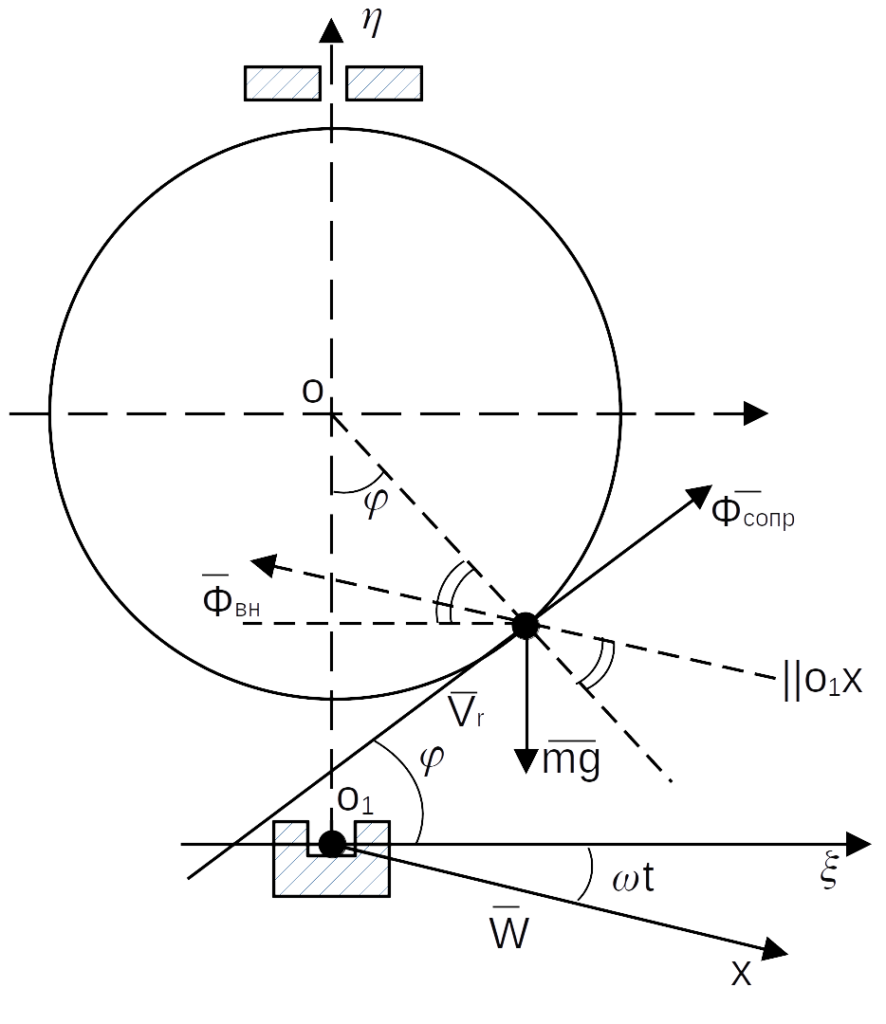
Запишем уравнение свободных малых колебаний в каноническом виде в присутствии силы сопротивления движению точки М.
(14) 
с учётом вынуждающей силы уравнение вынужденных малых колебаний точки М около устойчивого положения равновесия (уравнение (14)) дополним:
(15) 
8. Решение линейного неоднородного дифференциального уравнения второго порядка с постоянными коэффициентами (15):
Характеристическое уравнение имеет вид
(16) 
( решаем однородное уравнение и найдём его общее решение, обозначим  )
)
 ;
;
a) пусть  , тогда
, тогда
(17) 
b) если  , то
, то  , (т.к.
, (т.к.  )
)
(18) 
в) если  , то
, то

(19) 
Частное решение неоднородного уравнения (15) :
(20) 
 — подставляем в уравнение (15), получаем:
— подставляем в уравнение (15), получаем:
(21) 
— полное решение уравнения.

сравним коэффициенты при одинаковых тригонометрических функциях:
 , подставляем в (20), тогда
, подставляем в (20), тогда
(22) 
Вернёмся к уравнению (21), получим
а)  ; уравнение вынужденных колебаний точки М если
; уравнение вынужденных колебаний точки М если
б)  ; уравнение вынужденных колебаний точки М если
; уравнение вынужденных колебаний точки М если
в)  — уравнение вынужденных колебаний точки М если
— уравнение вынужденных колебаний точки М если