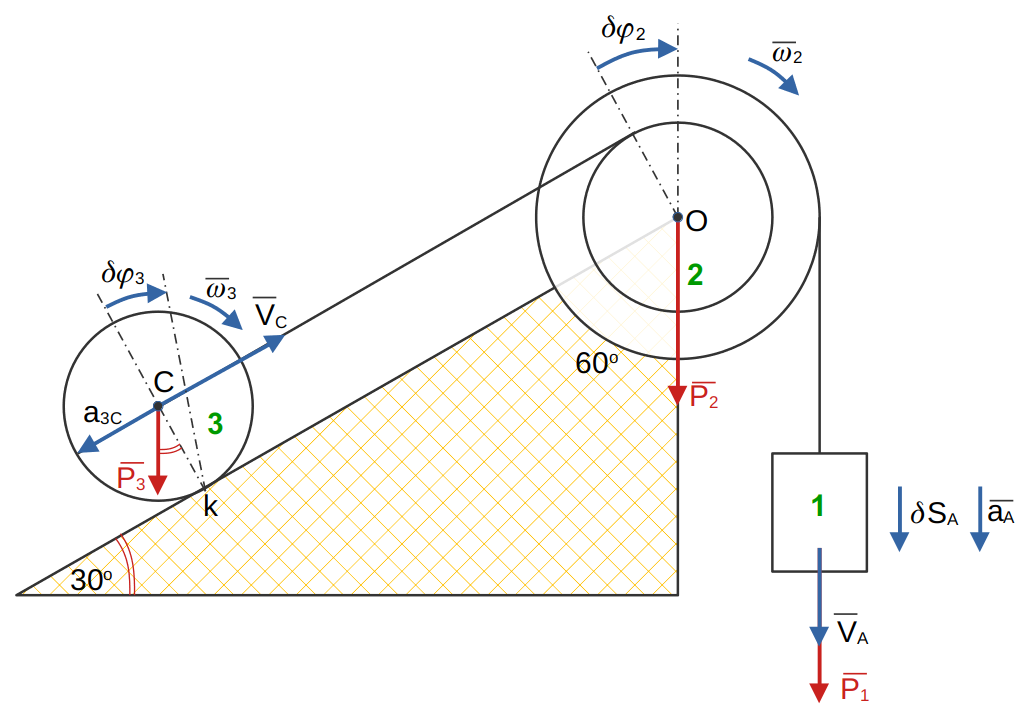
Движение системы, которое начинается из состояния покоя, происходит под действием силы тяжести тела 1.
Массы тел 1,2,3, соответственно, равны  2 Блог 2-ступенчатый однородный цилиндр радиусов
2 Блог 2-ступенчатый однородный цилиндр радиусов  с моментом инерции относительно оси симметрии J.
с моментом инерции относительно оси симметрии J.
Каток 3 — однородный цилиндр радиуса  .
.
Тела считать абсолютно твердыми а нити — абсолютно нерастяжимыми и невесомыми.
Найти ускорение центра тяжести тела 1 с помощью Общего Уравнения Динамики (ОУД), а также натяжение нитей.
Трением блока 2-3 о наклонную плоскость пренебречь.
Дано:



Определить:
 (ОУД)
(ОУД)

 (кинетостатика)
(кинетостатика)
Решение:
I. Применим (ОУД) — общее уравнение динамики для опеределения:
Изобразим ускорения точек и угловое ускорение звеньев (с условным направлением), так (см.рис.)  и
и  ,
,
соответственно, силы инерции и момент инерции добавим к активным силам системы ( ),
),
а именно:  ,
,
и  и момент
и момент 
1. Запишем общее уравнение динамики (ОУД)
(1) 
2. Сообщаем системе возможные элементарные перемещения и, составляя уравнение (1), получим
(при этом воспользуемся кинематическими соотношениями)
(2) 
3. Выразим все возможные перемещения через  , т.е.
, т.е. 
4. Кинетические соотношения: 
![\[ \omega_2 = \frac{V_A}{R_2}; \;\; \frac{d\varphi_2}{dt} = \frac{1}{R_2} \cdot \frac{dS_A}{dt} \rightarrow \delta\varphi_2=\frac{dS_A}{R_2} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-535de9e17ce569e1bce3740d6a302726_l3.svg "Rendered by QuickLaTeX.com")
![\[ \omega_3 = \frac{V_C}{R_3}; \;\; \frac{V_C}{V_A} = \frac{r_2}{R_2} \rightarrow V_C= \frac{r_2}{R_2} \cdot V_A; \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-e88fda118f5f021e8e19b8a86d0eafcc_l3.svg "Rendered by QuickLaTeX.com")
![\[ \frac{dS_3}{dt} = \frac{r_2}{R_2} \cdot \frac{dS_A}{dt} \rightarrow dS_{3C} = \frac{r_2}{R_2} \cdot dS_A \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-d2dd3a6e474a1fb34ef67d60652fc38f_l3.svg "Rendered by QuickLaTeX.com")
![\[ \omega_3 = \frac{r_2}{R_2} \cdot \frac{V_A}{R_3}; \;\; \frac{d\varphi_3}{dt} = \frac{r_2}{R_2 \cdot R_3} \cdot \frac{dS_A}{dt} \rightarrow d\varphi_3 = \frac{r_2}{R_2 \cdot R_3} \cdot dS_A \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-a5b35cf8b9b9f6a853390746bd33143a_l3.svg "Rendered by QuickLaTeX.com")
соотношения для уравнений
![\[ \varepsilon_3 = \frac{d\omega_3}{dt} = \frac{d^2\varphi_3}{dt^2} = \frac{r_2}{R_3 \cdot R_2} \frac{d^2S_A}{dt^2} = \frac{r_3}{R_3 \cdot R_2} \cdot \overline O_A \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-27a83360bfd060c19811261e9f2e097e_l3.svg "Rendered by QuickLaTeX.com")
![\[ \varepsilon_2 = \frac{a_1}{R_2}; \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-e8ab9403de5034704affc0c180e7df42_l3.svg "Rendered by QuickLaTeX.com")
![\[ \varepsilon_3 = \frac{r_2}{R_3 \cdot R_2} \cdot a_A; \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-b51dab4ff3959d28faa9b16d534f5ff3_l3.svg "Rendered by QuickLaTeX.com")
![\[ a_{3C} = \frac{r_2}{R_2} \cdot a_A; \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-7ea59f3e677e4563c3e89e21b62d781d_l3.svg "Rendered by QuickLaTeX.com")
5. Подставим полученные кинематические соотношения в уравнение (2), получим:
(3) 
Перепишем уравнение (3), при этом вынесем за фигурную скобку, тогда, чтобы уравнение (3) выполнялось, нужно выражение в фигурных скобках приравнять к нулю, т.к.  , получим
, получим
(4) ![\begin{equation*} \begin{split} \bigg\{ g \cdot \left( m_1 - \frac{m_3}{2} \frac{r_2}{R_2} \right) - \left[ \frac{J_2}{R_2} + m_1 + m_3 \left( \frac{r_2}{R_2} \right)^2 + \\ + \frac{m_3}{2} \cdot R_3^2 \cdot \frac{r_2^2}{R_3 \cdot R_2} \cdot \frac{1}{R_3 \cdot R_2} \Bigg] a_A \bigg\} dS_A = 0 \end{split} \end{equation*}](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-d4252e61dce973e5b80b81bdc6922fff_l3.svg "Rendered by QuickLaTeX.com")
Решая уравнение (4) относительно  , получим
, получим
(5) ![\begin{equation*} a_A = a_1 = \frac{ \left[ m_1 - \frac{m_3}{2} \frac{r_2}{R_2} \right] g }{ \left[ \frac{J_2}{R_2} + m_1 + \frac{3}{2} m_3 \left( \frac{r_2}{R_2} \right)^2 \right] } \end{equation*}](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-1e41f41052a95e5bcc92a9ce94c99e73_l3.svg "Rendered by QuickLaTeX.com")
— ускорение тела 1.
Примечание:
Движение тела 1 будет ускоренным при условии, что  и замедленным если
и замедленным если 
II
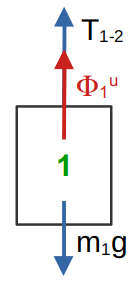 a). Определить натяжение нити на участке между телами 2 и 1: Применим принцип Д’Аламбера.
a). Определить натяжение нити на участке между телами 2 и 1: Применим принцип Д’Аламбера.
На рисунке 
Сообщив телу 1 возможное перемещение и полагая условно, что тело 1 движется ускоренно под действием силы тяжести, и добавив силу инерции  , запишем в соответствии с принципом Д’Аламбера:
, запишем в соответствии с принципом Д’Аламбера:
(6) 
где  -сила инерции, приложенная к телу 1.
-сила инерции, приложенная к телу 1.
 — сила натяжения нити.
— сила натяжения нити.
Из уравнения (6) получим: с учётом известного теперь из п.I значения для ускорения тела 1 

Окончательно получаем:
![\[ T_{1-2} = m_1g - m_1a_A = m_1(g-a_A) = m_1g \left[ \frac{m_1-\frac{m_3}{2} \frac{r_2}{R_2} }{m_1+ \frac{J_2}{R_2} + \frac{3}{2} m_3 ( \frac{r_2}{R_2} )^2 } \right] \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-c83e70568e507f94c9d22826d58ccabd_l3.svg "Rendered by QuickLaTeX.com")
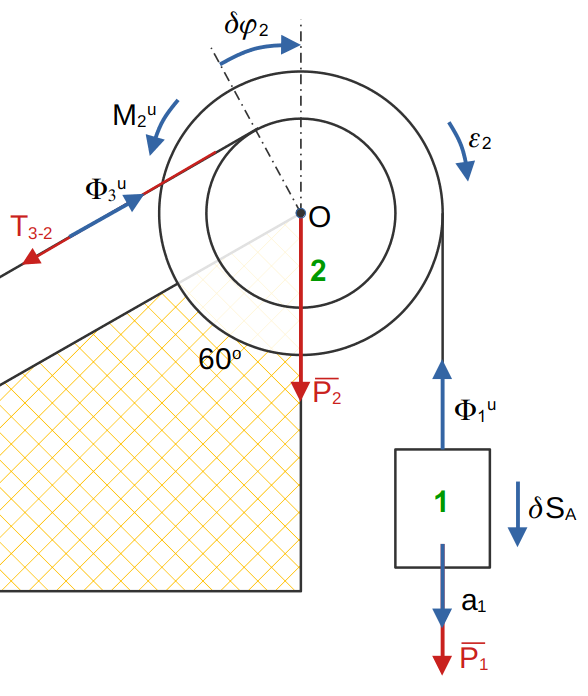
b). Определить натяжение нити на участке между телами 2 и 3.
![\[ M_2^u = J_2\varepsilon_2 = J_2 \cdot \frac{a_A}{R_2} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-89c4adc702ba32c1bc948e8ea438af2f_l3.svg "Rendered by QuickLaTeX.com")
![\[ \Phi_1^u = m_1 \cdot a_A \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-f413d1c65fb652545281e4a8dc145695_l3.svg "Rendered by QuickLaTeX.com")
![\[ \Phi_3^u = m_3 \cdot \frac{r_2}{R_2} \cdot a_A \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-8e8131411a3abb3e9d345bdb98b61c2a_l3.svg "Rendered by QuickLaTeX.com")
Составим уравнение Д’Аламбера 
(7) 
С учётом кинематических соотношений перепишем (7) и получим
![\[ \begin{split} m_1g \cdot (1-\frac{a_A}{g}) \cdot \delta S_A - \\ - T_{3-2} \cdot \frac{r_2}{R_2} \delta S_A - J_2 \frac{a_A}{R_2^2} \delta S_A = 0 \end{split} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-317db698c4b7ff3798f00d6dcc63d3a5_l3.svg "Rendered by QuickLaTeX.com")
так как , то
(8) 
Решая (8) относительно  , получим ответ:
, получим ответ:
![\[ T_{3-2} = \frac{R_2}{r_2} \cdot m_1g \left[ 1 - \frac{m_1 - \frac{m_3}{2} \frac{r_2}{R_2} }{m_1+\frac{J_2}{R_2}+\frac{3m_3}{2} (\frac{r_2}{R_2})^2 } \right] \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-a5452d07f1a55692daae515ba7ede034_l3.svg "Rendered by QuickLaTeX.com")