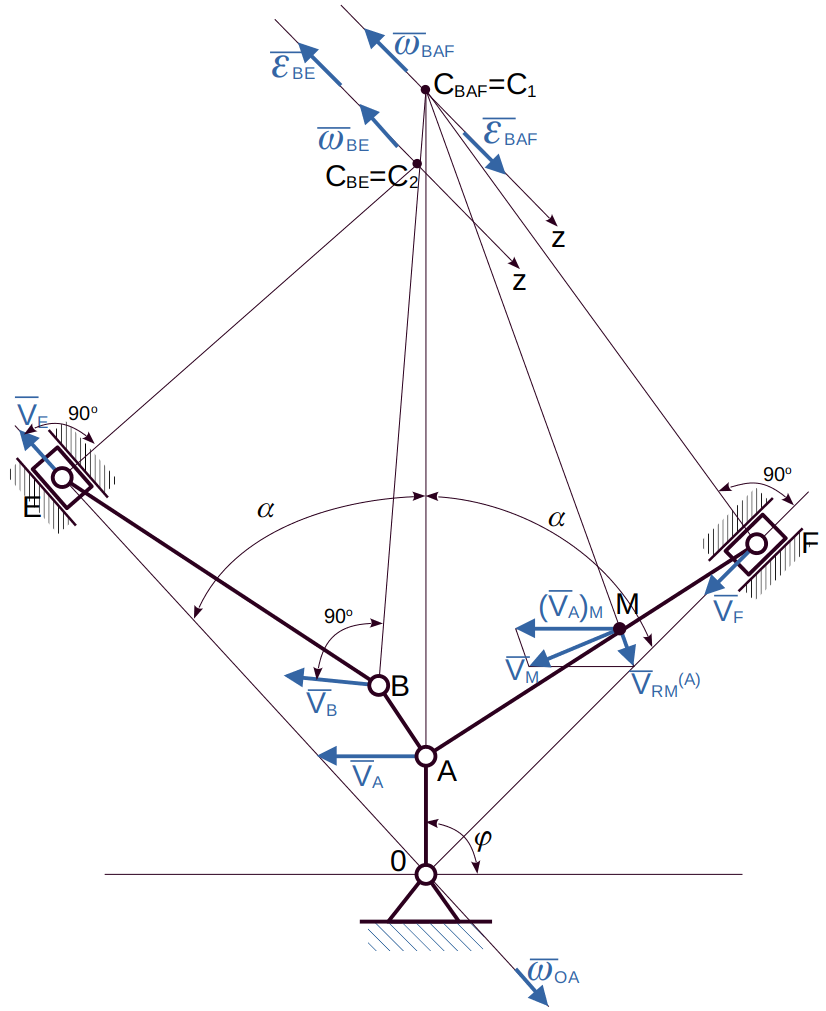
Рис.1
В положении механизма, указанном на рис.1, определить аналитически и построить на чертеже :
- положение мгновенных центров скоростей всех звеньев, совершающих плоское движение;
- скорости всех, точек механизма, расположенных в местах соединения звеньев (шарнирах);
- угловые скорости всех звеньев;
- ускорение точки А;
- ускорений других точек механизма методом полюса;
- угловые ускорения звеньев;
- касательное и нормальное ускорения точки В;
- установить характер движения точки В (ускоренное, замедленное, мгновенная остановка).
Дано:







 = 30 об./мин.
= 30 об./мин.
Определить:
1)  = ?
= ?
2)  = ?
= ?
3)  = ?
= ?
4)  = ?
= ?
Решение:
I. Определим скорости точек и угловые скорости звеньев механизма (метод мгновенного центра скоростей, мцс)
1.1 Определим угловую скорость ведущего кривошипа OA:
![\[ \omega_{OA} = \frac{2\pi n_{OA}}{60} = \frac{2\pi \cdot 30}{60} = \Pi (cek^{-1}) = 3.14 (cek^{-1}) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-14aee00e2113d35cfbbe84a3ab847e95_l3.svg "Rendered by QuickLaTeX.com")
C1: вектор  оси
оси  — оси вращения кривошипа OA (см. рис.1),
— оси вращения кривошипа OA (см. рис.1), 
1.2 Рассмотрим кривошип OA:
![\[ V_A = \omega_{OA} \cdot \vert OA \vert = \Pi \cdot 0.25 \cong 0.78 (\frac{m}{c}) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-0302fa1ab5a0a70b7519e3737801eb2c_l3.svg "Rendered by QuickLaTeX.com")
C2:  в сторону вращения кривошипа OA (см. рис.1)
в сторону вращения кривошипа OA (см. рис.1)
1.3 рассмотрим уголковый шатун BAF
Точка  — мгновенный центр скоростей шатуна BAF
— мгновенный центр скоростей шатуна BAF
ось  — мгновенная ось вращения шатуна BAF.
— мгновенная ось вращения шатуна BAF.
(1) 
Примечание: Так как на Рис.1 звенья механизма изображены в масштабе, то величины (размеры) мгновенных радиусов точек, а именно:  и
и  берутся с рисунка.
берутся с рисунка.
![\[ V_F = V_A \cdot 0.85 = 0.78 \cdot 0.85 = 0.66 (m/c) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-630c59ce3cb4d609e57cf05bcc2e6615_l3.svg "Rendered by QuickLaTeX.com")
C3: вектор скорости  по направляющей в сторону поворота шатуна (вниз).
по направляющей в сторону поворота шатуна (вниз).
Определим скорость точки B
Угловая скорость шатуна BAF:
(2) 
C4: Вектор  , т.к. шатун относительно оси поворачивается по часовой стрелке.
, т.к. шатун относительно оси поворачивается по часовой стрелке.
(3) 
Примечание: Величина  так-же берётся с Рис.1.
так-же берётся с Рис.1.
Из (3) получаем
![\[ V_B = V_A \cdot 0.91 = 0.78 \cdot 0.91 = 0.71 (m/c) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-320af8900e62545781b86bc26c770a1e_l3.svg "Rendered by QuickLaTeX.com")
C5: вектор  и направлен в сторону вращения шатуна BAF.
и направлен в сторону вращения шатуна BAF.
1.4 Рассмотрим шатун «BE»
Точка  — мгновенный центр скоростей шатуна «BE»
— мгновенный центр скоростей шатуна «BE»
Ось  — мгновенная ось вращения шатуна «BE»
— мгновенная ось вращения шатуна «BE»
(4) 
Из (4) получаем:
![\[ V_E = V_B \cdot 0.91 = 0.91 \cdot 0.71 = 0.65 (m/c) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-17759622ecbf168943e3e2d780cf205d_l3.svg "Rendered by QuickLaTeX.com")
C6: Вектор  и направлен по направляющей вверх (см. Рис.1).
и направлен по направляющей вверх (см. Рис.1).
Угловая скорость шатуна BE:
(5) 
Примечание: Величину  берём из рис. 1 с учётом масштаба.
берём из рис. 1 с учётом масштаба.
C7: вектор угловой скорости шатуна BE  (от нас),
(от нас),
т.к. «отсюда» видим вращение по часовой стрелке относительно оси
1.5 Определим скорость точки M:
а) метод «мгновенного центра скоростей»:
Точка M  шатуну BAF, точка
шатуну BAF, точка  — мгновенный центр скоростей BAF,
— мгновенный центр скоростей BAF,  — мгновенный радиус точки M.
— мгновенный радиус точки M.
(6) 
Из (6) получаем:
![\[ V_M = V_A \cdot 0.87 = 0.78 \cdot 0.87 = 0.68 (m/c) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-fa419db3dce3eaa168d41b2b3f229501_l3.svg "Rendered by QuickLaTeX.com")
C8: Вектор скорости  и направлен в сторону вращения шатуна BAF
и направлен в сторону вращения шатуна BAF
б) метод «полюса»: точка А — полюс
(7) 
Где  — вращательная скорость точки M относительно «полюса» A, вектор направлен перпендикулярно
— вращательная скорость точки M относительно «полюса» A, вектор направлен перпендикулярно 
![\[ \overline V_{RM}^{(A)} = \left[ \overline \omega_{BAF} \cdot \vec{AM} \right] ; \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-2ebfb77a6c7ea29925181f13eaaaa92c_l3.svg "Rendered by QuickLaTeX.com")
![\[ \overline V_{RM}^{(A)} = \vert \overline \omega_{BAF} \vert \cdot \vert \vec{AM} \vert = 0.55 \cdot 0.5 = 0.28 (\frac{m}{c}) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-1427177997bb460ee500a348ab2bb31d_l3.svg "Rendered by QuickLaTeX.com")
![\[ \vert \overline V_{M}^{(A)} \vert = \sqrt{ V_A^2 + (\overline V_{RM}^{(A)})^2 - 2 \vert \overline V_A \vert \cdot \vert \overline V_{RM}^{(A)} \vert \cdot \cos(\overline V_A;\overline V_{RM}^{(A)})} = \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-0169d16b1f4078ef964175ab35515f6e_l3.svg "Rendered by QuickLaTeX.com")
![\[ = \sqrt{ 0.78^2 + 0.28^2 - 2 \cdot 0.78 \cdot 0.28 \cdot 0.342 } = \sqrt{0.537} \cong 0.73(\frac{m}{c}) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-cc26d0ee64959afcfd27e39f3e86b0a5_l3.svg "Rendered by QuickLaTeX.com")
 = 0.342 (величина угла взята с рис.1)
= 0.342 (величина угла взята с рис.1)
Сравним  = 0.68 m/c (мцс) и «метод полюса» = 0.73 m/c : погрешность расчёта составляет
= 0.68 m/c (мцс) и «метод полюса» = 0.73 m/c : погрешность расчёта составляет
![\[ \Delta = \frac{0.73-0.68}{(0.73+0.68)/2} = \frac{0.05}{0.71} \cong 0.07 \;\;\; : \;\;\; \Delta = 7\% . \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-e632ecf0190982b18faa3bc9002b45b5_l3.svg "Rendered by QuickLaTeX.com")
II. Определение ускорений точек и угловых ускорений звеньев механизма. (методом «полюса»)
2.1 Ускорение точки A, принадлежащей кривошипу OA, который вращается вокруг неподвижной оси 
(8) 
(9) 
где  и
и  — вращательное и осестремительное ускорения точки A около оси соответственно.
— вращательное и осестремительное ускорения точки A около оси соответственно.
(10) 
![\[ (\omega_{OA}= const = \Pi c^{-1}) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-6ae2a9f684639b7a54808a15f68f1ea6_l3.svg "Rendered by QuickLaTeX.com")
С учётом (9) и (10) из (8) получим:
(11) 
(12) 
тогда их (11) с учётом (12) получим
![\[ \vert \overline W_{A} \vert = 2.46 (\frac{m}{c^2}) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-091407bcf5ce6cd4f385b1006c9b73a4_l3.svg "Rendered by QuickLaTeX.com")
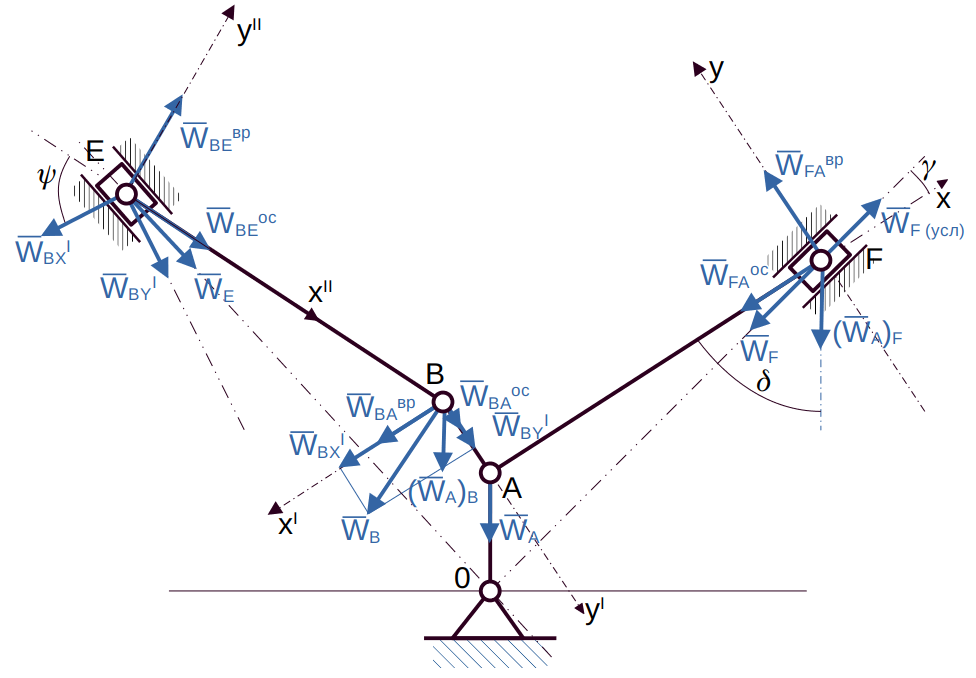
Рис.2
C9:  направлен из точки A к оси (см.рис.2).
направлен из точки A к оси (см.рис.2).
2.2 Рассмотрим шатун BAF
а) определяем ускорение точки F
(13) 
где  и
и  — вращательное и осестремительное ускорения точки F вокруг «полюса» A, соответственно.
— вращательное и осестремительное ускорения точки F вокруг «полюса» A, соответственно.
(14) 
C10: Вектор осестремительного ускорения направлен от точки F к «полюсу» A (см.рис.2)
C11: Для вектора вращательного ускорения известна только линия действия (л.д.),  (направление также выбираем условно см.рис.2)
(направление также выбираем условно см.рис.2)
C12: Для вектора  — (ускорения «ползуна» F) известна только линия действия (л.д.) — направляющая «OF» (направление также выберем условно)
— (ускорения «ползуна» F) известна только линия действия (л.д.) — направляющая «OF» (направление также выберем условно)
![\[ \vert \overline W_{FA}^{bp} \vert = \vert \overline \varepsilon_{BAF} \vert \cdot \vert \overline{AF} \vert \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-267cc287fb1394fe544263ed648a4fef_l3.svg "Rendered by QuickLaTeX.com")
(15) 
Спроектируем векторное равенство (13) на оси координат «XFY»:
 :
: (16) 
 :
: (17) 
C13:  (см.рис.2)
(см.рис.2)

 , где величину этих углов берём с чертежа (см.рис.2)
, где величину этих углов берём с чертежа (см.рис.2)
Далее перепишем (16) и (17), подставляя числовые значения:
(18) 
(19) 
Из уравнения (16) получим:
![\[ \vert\overline{W_F}\vert = - \frac{2.46 \cdot 0.70 + 0.26}{0.98} = - \frac{1.46}{0.98} = - 1.49 (\frac{m}{c^2}) < 0 \;\; ! \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-bf99be541125561687987c085d354fe8_l3.svg "Rendered by QuickLaTeX.com")
C14: Получили, что  , следовательно, условное направление надо поменять на противоположное (см.рис.2)
, следовательно, условное направление надо поменять на противоположное (см.рис.2)
Из уравнения (17) получим:
![\[ \vert \overline W_{FA}^{bp} \vert = \vert\overline{W_F}\vert \cdot 0.17 + 2.46 \cdot 0.82 = 1.49 \cdot 0.17+2.02=2.27 (\frac{m}{c^2}) > 0 \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-70bbf461276b1ce557a19081f240ca7b_l3.svg "Rendered by QuickLaTeX.com")
C15: Так как  , то условное направление верно! (см.рис.2).
, то условное направление верно! (см.рис.2).
Определим угловое ускорение шатуна BAF:
(20) 
Направление  определяем из векторного произведения
определяем из векторного произведения
![\overline W_{FA}^{bp} = \left[ \overline\varepsilon_{BAF} \cdot \vec{AF} \right]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-e8418bdb2ae886d9acb9c01f6ebef6fb_l3.svg "Rendered by QuickLaTeX.com") (см.рис.2)
(см.рис.2)
C16: Вектор  и, так как
и, так как  , то шатун «BAF» вращается замедленно ! (см.рис.1)
, то шатун «BAF» вращается замедленно ! (см.рис.1)
б) Определим ускорение точки  (метод «полюса»):
(метод «полюса»):
(21) 
![\[ \vert \overline W_{BA}^{oc} \vert = \omega_{BAF}^2 \cdot \vert \overline AB \vert = 0.55^2 \cdot 0.20 = 0.060 (\frac{m}{c^2}) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-f30a675152e21359863dc7ead16f66f8_l3.svg "Rendered by QuickLaTeX.com")
где  (см. пункт I.)
(см. пункт I.)
C17: Вектор  направлен по
направлен по  от точки B к «полюсу» A (см.рис.2).
от точки B к «полюсу» A (см.рис.2).
С учётом (20) получим, что:
![\[ \vert \overline W_{BA}^{bp} \vert = \varepsilon_{BAF} \cdot \vert \overline{AB} \vert = 2.67 \cdot 0.20 = 0.53 (\frac{m}{c^2}) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-14da862bdd2fb9710ff4886d188ec819_l3.svg "Rendered by QuickLaTeX.com")
(22) ![\begin{equation*} \overline W_{BA}^{bp} = \left[ \overline\varepsilon_{BAF} \cdot \vert\vec{AB}\vert \right] \end{equation*}](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-b198b4000b1882cddc8bda41f056c850_l3.svg "Rendered by QuickLaTeX.com")
C18: Вектор  (см.рис.2).
(см.рис.2).
Спроектируем векторное равенство (21) на оси  :
:
на ось 
(23) 

(24) 

угол  берём с чертежа (см.рис.2).
берём с чертежа (см.рис.2).
Перепишем (23) и (24), подставляя числовые значения:
(25) 
(26) 
Далее находим абсолютную величину ускорения точки B:
(27) 
Направление вектора  определяется направляющими косинусами по отношению к осям BXY.
определяется направляющими косинусами по отношению к осям BXY.
(28) 
Соотношение (27) и (28) представляют вектор по величине (27) и направлению (28)
2.3 Рассмотрим шатун «BE»
Запишем для  — вектора ускорения точки
— вектора ускорения точки  шатуну «BE» (по методу «полюса») векторное равенство:
шатуну «BE» (по методу «полюса») векторное равенство:
(29) 
Спроецируем (29) на оси координат  и
и  (см. рис.2)
(см. рис.2)
(30) 
(31) 
![\[ \vert \overline W_{BE}^{oc} \vert = \omega_{BE}^2 \cdot \vert \overline{BE} \vert = 0.64^2 \cdot 0.80 = 0.33 (\frac{m}{c^2}) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-2931097653deeddb6a4e9e150d9259ad_l3.svg "Rendered by QuickLaTeX.com")
Далее перепишем (30) и (31), подставляя числовые значения, получим
(32) 
(33) 
Здесь также значение угла  берём с чертежа (см.рис.2)
берём с чертежа (см.рис.2)
![\[ \psi = 75^o; \;\;\;\; \cos\psi = 0.259; \;\;\;\; \sin\psi = 0.966 \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-fbdb8b2c9e8140948925bdbffa1e627a_l3.svg "Rendered by QuickLaTeX.com")
Из (32) определим величину вектора ускорения точки E
![\[ \vert \overline W_E \vert = \frac{1}{0.259} \left( -0.583 + 1.66 + 0.33 \right) = 4.50 (\frac{m}{c^2}) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-b344505914f752e461882a690826c369_l3.svg "Rendered by QuickLaTeX.com")
Из (33) определим величину вектора вращательного ускорения точки «E» около «полюса» B:
![\[ \vert \overline W_{BE}^{bp} \vert = -0.966 \cdot 4.50 + 2.25 \cdot 0.966 + 2.08 \cdot 0.259 = \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-bbb57b624eff619a9ee7260b75f9b0c5_l3.svg "Rendered by QuickLaTeX.com")
(34) 
Определим величину углового ускорения шатуна BE с учётом (34)
![\[ \vert \overline \varepsilon_{BE} \vert = \frac{\vert \overline W_{BE}^{bp} \vert}{\vert \overline{BE} \vert} = \frac{1.63}{0.80} = 2.04 (c^{-2}) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-b73e42967c1660721cb96248943bd95f_l3.svg "Rendered by QuickLaTeX.com")
Направление вектора  определим из векторного произведения:
определим из векторного произведения:
(35) ![\begin{equation*} \overline W_{BE}^{bp} = \left[ \overline \varepsilon_{BE} \cdot \vec{BE} \right] \end{equation*}](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-dc746090665b339b7e5a9efc93b234d8_l3.svg "Rendered by QuickLaTeX.com")
C19: Так как получили (34), что  , то следует условное направление вектора изменить на противоположное (рис.2), тогда чтобы удовлетворить векторное произведение (35), вектор
, то следует условное направление вектора изменить на противоположное (рис.2), тогда чтобы удовлетворить векторное произведение (35), вектор  (см. рис.1), а поскольку получили, что
(см. рис.1), а поскольку получили, что  , то, значит, характер вращения шатуна «BE» — ускоренный.
, то, значит, характер вращения шатуна «BE» — ускоренный.
Ответ:
![\[ \begin{matrix} V_A = 0.78 \frac{m}{c} & W_A = 2.46 \frac{m}{c^2} & \omega_{BAF} = 0.55 c^{-1} \\ V_B = 0.71 \frac{m}{c} & W_B = 3.06 \frac{m}{c^2} & \omega_{BE} = 0.64 c^{-1} \\ V_F = 0.66 \frac{m}{c} & W_F = 1.49 \frac{m}{c^2} & \varepsilon_{OA} = 0 \\ V_E = 0.65 \frac{m}{c} & W_E = 4.50 \frac{m}{c^2} & \varepsilon_{BAF} = 2.67 c^{-2} \\ V_M = 0.68 \frac{m}{c} & W_{OA} = 3.14 c^{-1} & \varepsilon_{BE} = 2.04 c^{-2} \end{matrix} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-780612f58a0cc34da4e8177b0a27ed62_l3.svg "Rendered by QuickLaTeX.com")