Вариант №21 (из сборника Колебания механических систем: пособие по выполнению РГР / Г.Т. Алдошин, Н.Н. Дмитриев и др..; Балт. гос.техн. ун-т.-СПб., 2016.- 79 с.)
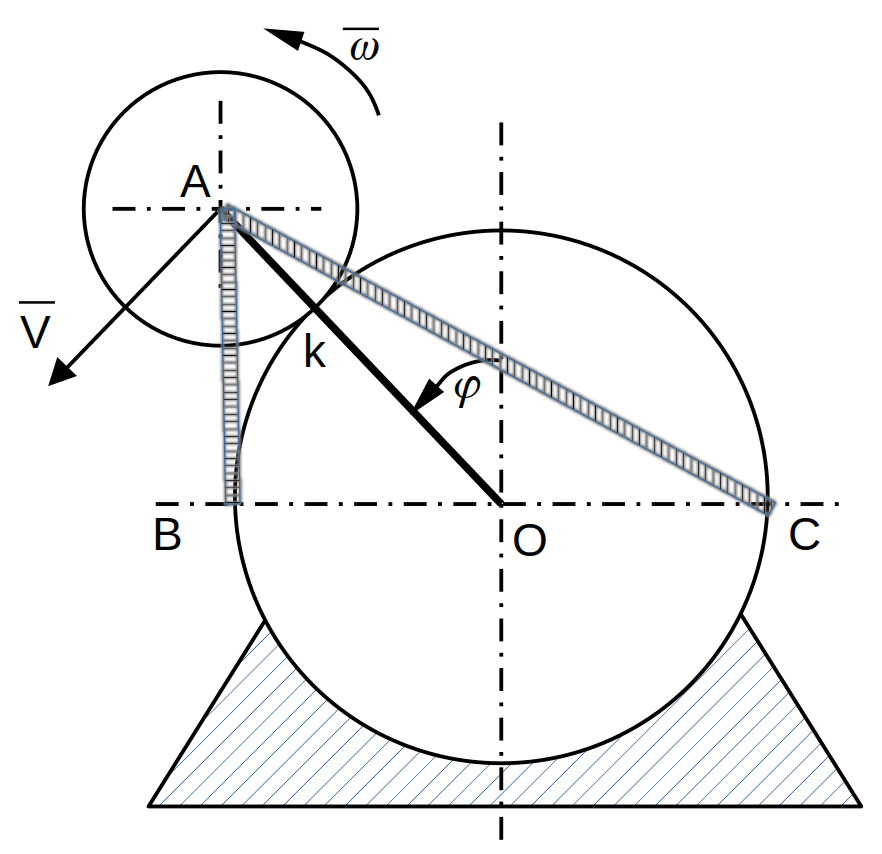
Однородное зубчатое колесо массой «m» и радиусом «r» находится во внешнем зацеплении с неподвижным колесом радиуса  .
.
К оси подвижного колеса прикреплены две пружины (одинаковые), концы которых B и C расположены на горизонтальном диаметре неподвижного колеса. При  пружины находятся в свободном состоянии.
пружины находятся в свободном состоянии.
Пренебрегая весом кривошипа «ОА», определить:
- Жёсткость пружины, при которой положение является положением устойчивого равновесия.
- Период малых свободных колебаний системы около данного положения равновесия
- Малые колебания системы около положения равновесия при нулевых начальных условиях если на кривошип действует момент
 , где
, где  — период свободных колебаний системы.
— период свободных колебаний системы.
Дано: 
Определить (1), (2), (3)
1. Определить жесткость пружины, при которой положение равновесия является положением устойчивого равновесия.
Условие устойчивого положения равновесия:
 (1),
(1),  (отсюда находится положение равновесия
(отсюда находится положение равновесия  ).
).
За обобщенную координату принимаем  ,
,  — обобщённая скорость.
— обобщённая скорость.
Для нахождения потенциальной энергии  системы:
системы: 
 константа.
константа. 

 (кстати, при
(кстати, при  ), т.е.
), т.е.  является положением равновесия системы.
является положением равновесия системы.
 ; при ; получим
; при ; получим  (
(  )
)
Примечание: Без пружин , неустойчиво.
Запишем выражение для потенциальной энергии системы, когда имеются пружины, жесткость которых следует определить, а именно:
при двух пружинах —  (3).
(3).
 (4).
(4).
 (5), при
(5), при  .
.
подставляем в (5) значение , получим:
 , тогда
, тогда  — жёсткость пружины, при которой будет устойчиво.
— жёсткость пружины, при которой будет устойчиво.
2. Определить период малых колебаний системы около положения равновесия …
 (6), где k — циклическая частота малых свободных колебаний системы.
(6), где k — циклическая частота малых свободных колебаний системы.
Дифференциальное уравнение свободных малых колебаний около положения равновесия:
 (7) Однородное дифференциальное уравнение второго порядка с постоянными коэффициентами,
(7) Однородное дифференциальное уравнение второго порядка с постоянными коэффициентами,
где  (8)
(8)
 — коэффициент квазиупругости (см. определение выше (5))
— коэффициент квазиупругости (см. определение выше (5))
 — коэффициент квазиинерционности.
— коэффициент квазиинерционности.
— кинетическая энергия системы.
Подвижное колесо совершает плоско-параллельное движение, тогда
 (9) , т.к.
(9) , т.к.  , то
, то
 (10)
(10)
 (11)
(11)
 (12)
(12)
Подставляя (10) — (12) в (9), получим
 , (13)
, (13)
тогда  (14)
(14)
С учётом (5) и (14) получим из (8) :
 , тогда
, тогда
 (15)
(15)
 — период малых свободных колебаний системы.
— период малых свободных колебаний системы.
3. Записать уравнение малых колебаний системы при нулевых начальных условиях, если на кривошип действует момент  .
.
Дифференциальное уравнение вынужденных малых колебаний системы имеет вид:
 (16)
(16)
(Для удобства записи обозначим  )
)
Уравнение (16) — это неоднородное линейное дифференциальное уравнение с постоянными коэффициентами, решение уравнения (16) найдем в виде
 (17), где
(17), где
 — Общее решение однородного уравнения (7)
— Общее решение однородного уравнения (7)
 — частное решение неоднородного уравнения (16), которое ищется в форме правой части уравнения (16).
— частное решение неоднородного уравнения (16), которое ищется в форме правой части уравнения (16).
 (18)
(18)
k — циклическая частота (см.(8))
Пусть
 (19)
(19)
Подставляем (19) в уравнение (16), получим

сравним коэффициенты при степени «e» в левой и правой части, получим, что
 , отсюда
, отсюда
 , тогда
, тогда
 (20)
(20)
вернёмся к (17), получим с учётом (18) и (20):
 (21) — уравнение вынужденных колебаний системы
(21) — уравнение вынужденных колебаний системы
4. Определим произвольные постоянные  и
и  при нулевых начальных условиях :
при нулевых начальных условиях :  при
при 
Подставляя начальные условия в (21) получим:
 см. (15)
см. (15)
 (22)
(22)
 , отсюда
, отсюда  (23)
(23)
Окончательно: подставим в (21) и (23), получим
 — уравнение вынужденных малых колебаний при нулевых начальных условиях.
— уравнение вынужденных малых колебаний при нулевых начальных условиях.