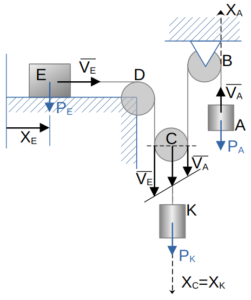
Однородная нить, к концу которой привязан груз А весом P, огибает неподвижный блок В, охватывает блок С, поднимается вверх на неподвижный блок D и проходит параллельно горизонтальной плоскости, где к ее концу привязан груз E веса P. Коэффициент трения скольжения груза E о горизонтальную плоскость равен f.
К оси блока С прикреплен груз К весом Q, под действием силы тяжести которого происходит движение системы.
Пренебрегая весом блоков В, С, D, определить ускорения грузов А, E, К и натяжение нити.
Дано:

 (коэффициент трения скольжения)
(коэффициент трения скольжения)


Определить:

 (натяжение нити)
(натяжение нити)
Решение:
1)  , число степеней свободы:
, число степеней свободы:

 — обобщ. скорость
— обобщ. скорость
 — обобщ. скорость
— обобщ. скорость
2) Уравнения Лагранжа :
(1) ![\begin{equation*} \frac{d}{dt} \left[ \frac{\partial T}{ \partial ( \frac{dX_A}{dt} )} \right] - \frac{\partial T}{\partial X_A} = Q_A \end{equation*}](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-f7ea70b963ab144c7e4b40f2fc4e0a6d_l3.svg "Rendered by QuickLaTeX.com")
(2) ![\begin{equation*} \frac{d}{dt} \left[ \frac{\partial T}{ \partial ( \frac{dX_E}{dt} )} \right] - \frac{\partial T}{\partial X_E} = Q_E \end{equation*}](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-a933e011b86be22ebfd380066b9ddfd3_l3.svg "Rendered by QuickLaTeX.com")
3) Определить кинетическую энергию системы:
 ,
,

Кинематические связи системы
(3) 
Так как  , тогда
, тогда  , отсюда после сокращения на dt получим элементарное перемещение груза C
, отсюда после сокращения на dt получим элементарное перемещение груза C
(4) 
а так как при определении виртуальных перемещений ограничения становятся неизменяемыми, то
(5) 
 (нить нерастяжимая)
(нить нерастяжимая)
Выразить кинетическую энергию системы через обобщённые скорости и координаты:
(6) ![\begin{equation*} \begin{aligned} T = \frac{1}{2} \frac{P_A}{g} \left( \frac{dX_A}{dt} \right)^2 +\\ + \frac{1}{2} \frac{P_E}{g} \left( \frac{dX_E}{dt} \right)^2 +\\ + \frac{1}{2} \frac{P_K}{g} \left[ \frac{1}{2} \left( \frac{dX_A}{dt} +\\ + \frac{dX_E}{dt} \right) \right]^2 = \\ = \frac{1}{2} \frac{P_A}{g} \left( \frac{dX_A}{dt} \right)^2 +\\ + \frac{1}{2} \frac{P_E}{g} \left( \frac{dX_E}{dt} \right)^2 +\\ + \frac{1}{8} \frac{P_K}{g} \left[ \left( \frac{dX_A}{dt} \right)^2 +\\ + 2 \cdot \frac{dX_A}{dt} \cdot \frac{dX_E}{dt} +\\ + \left( \frac{dX_E}{dt} \right)^2 \right] = \\ = \frac{1}{8g} \cdot (4P+Q) \left( \frac{dX_A}{dt} \right)^2 +\\ + \frac{1}{8g} \cdot (4P+Q) \left( \frac{dX_E}{dt} \right)^2 +\\ + \frac{Q}{4g} \cdot \frac{dX_A}{dt} \cdot \frac{dX_E}{dt} ; \end{aligned} \end{equation*}](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-28ec179554a2c52cd284ef6277121bd1_l3.svg "Rendered by QuickLaTeX.com")
4) Определить обобщённые силы системы, соответствующие выбранным обобщённым координатам:
виртуальная работа приложенных к системе сил равна
(7) 
Пользуясь тем, что обобщённые координаты не зависимы между собой, запишем отдельно а) и б), а именно:
a)  ,
,
тогда  (смотри (5) )
(смотри (5) )
(8) 

(9) 

 — правая часть уравнения (1), множитель, стоящий в выражении для виртуальной работы перед вариацией обобщенной координаты, — обобщённая сила, соответствующая выбранной координате
— правая часть уравнения (1), множитель, стоящий в выражении для виртуальной работы перед вариацией обобщенной координаты, — обобщённая сила, соответствующая выбранной координате  .
.
б) 
 — виртуальная работа с учётом трения скольжения
— виртуальная работа с учётом трения скольжения

(10) 
формулу (8) перепишем с учётом (10), получим
![\[ \delta A = \frac{1}{2} ( Q - 2fP_E ) \cdot \delta X_E = \frac{1}{2} ( Q - 2f P ) \cdot \delta X_E ; \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-deeb0248002e26ee58c0d45a0c29a96e_l3.svg "Rendered by QuickLaTeX.com")
 — правая часть уравнения (2) аналогично п. а) — обобщённая сила соответствующая выбранной координате
— правая часть уравнения (2) аналогично п. а) — обобщённая сила соответствующая выбранной координате  .
.
5) Составить уравнения Лагранжа (1) и (2)
для уравнения (1):
![\[ \frac{\partial T}{\partial X_A} = 0 ; \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-32e1c15206a054125d44d1ff3faa8b85_l3.svg "Rendered by QuickLaTeX.com")
Взять частную производную по времени от кинетической энергии системы (6) по обобщённой скорости 
(11) ![\begin{equation*} \left[ \frac{\partial T}{\partial \left( \frac{dX_A}{dt} \right) } \right] = \frac{4P+Q}{4g} \cdot \frac{dX_A}{dt} + \frac{Q}{4g} \cdot \frac{dX_E}{dt} \end{equation*}](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-c7baa982730152a9c0e3e8852a8d525c_l3.svg "Rendered by QuickLaTeX.com")
Определить полную производную по времени от (11)
(12) ![\begin{equation*} \frac{d}{dt} \left[ \frac{\partial T}{\partial \left( \frac{dX_A}{dt} \right) } \right] = \frac{4P+Q}{4g} \cdot \frac{d^2X_A}{dt^2} + \frac{Q}{4g} \cdot \frac{d^2X_E}{dt^2} : \end{equation*}](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-ba0d3bbdc42ee3168698595f36f4e8da_l3.svg "Rendered by QuickLaTeX.com")
Перепишем (1) с учётом (11) и (12), получим
(13) 
перепишем уравнение (13) с учётом кинематических соотношений (  ):
):
(14) 
для уравнения (2):
(15) 
Возьмем частную производную по времени от выражения для кинетической энергии (6) по обобщённой скорости 
(16) ![\begin{equation*} \left[ \frac{\partial T}{\partial \left( \frac{dX_E}{dt} \right) } \right] = \frac{4P+Q}{4g} \cdot \frac{dX_E}{dt} + \frac{Q}{4g} \cdot \frac{dX_A}{dt} ; \end{equation*}](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-122d0331d52e048ef1385c4f96540e47_l3.svg "Rendered by QuickLaTeX.com")
Полная производная по времени от (16) :
(17) ![\begin{equation*} \frac{d}{dt} \left[ \frac{\partial T}{\partial \left( \frac{dX_E}{dt} \right) } \right] = \frac{4P+Q}{4g} \cdot \frac{d^2X_E}{dt^2} + \frac{Q}{4g} \cdot \frac{d^2X_A}{dt^2} ; \end{equation*}](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-df2f6d83b3841bda27891b5d868bd9b4_l3.svg "Rendered by QuickLaTeX.com")
Перепишем (2) с учётом кинематических соотношений (16) и (17), получим
(18) 
перепишем уравнение (2):
![\[ \frac{4P+Q}{4g} \cdot W_E + \frac{Q}{4g} \cdot W_A = \frac{1}{2} \cdot (Q-2fP) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-f253da15ef52c3a36e0544a2eb0c66ca_l3.svg "Rendered by QuickLaTeX.com")
Решаем совместно алгебраические уравнения (13) и (18)
Обозначим:

тогда уравнения перепишем с этими обозначениями, умножим каждое уравнение на b и a соответственно:
![\[ - \left\{ \begin{matrix} a \cdot W_A + b \cdot W_E = c \\ b \cdot W_A + a \cdot W_E = d \end{matrix} \qquad\qquad \bigg| \begin{matrix} \times b \\ \times a \end{matrix} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-d02b57645208e328d6eae797eef43792_l3.svg "Rendered by QuickLaTeX.com")
и вычтем почленно нижнее уравнение из верхнего
![\[ \left\{ \begin{matrix} a \cdot b \cdot W_A + b^2 \cdot W_E = c \cdot b \\ a \cdot b \cdot W_A + a^2 \cdot W_E = a \cdot d \end{matrix} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-2053f511058f54f94217bb3e63c544ef_l3.svg "Rendered by QuickLaTeX.com")
![\[ (b^2-a^2) \cdot W_E = (cb-ad) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-3636b64f7f8cc62e91f71320083306e7_l3.svg "Rendered by QuickLaTeX.com")
(19) 
подставляя (19) в верхнее уравнение системы, получим
![\[ ab \cdot W_A + \frac{b^2(cb-ad)}{(b^2-a^2)} = cb \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-aaaee2ef51aa874ec967685661d2ef79_l3.svg "Rendered by QuickLaTeX.com")
![\[ \begin{split} W_A = \frac{cb}{ab} - \frac{b^2(cb-ad)}{ab (b^2-a^2)} = \\ = \frac{c}{a} - \frac{b}{a} \frac{(cb-ad)}{(b^2-a^2)} = \\ = \frac{1}{a} \bigg( \frac{c-cb^2+abd}{b^2-a^2} \bigg) = \\ = \frac{1}{a} \frac{cb^2-ca^2-cb^2-abd}{(b^2-a^2)} = \\ = \frac{-a(ca+bd)}{a(b^2-a^2)} = \frac{ac+bd}{a^2-b^2} \end{split} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-f88ddbc706c9713d76d121434ae111ca_l3.svg "Rendered by QuickLaTeX.com")
т.е.:  (поменяем знаки в
(поменяем знаки в  ).
).
![\[ \boldsymbol{W_K} = \frac{1}{2} (W_A+W_E) = \frac{1}{2} \frac{ac+bd+ad-cb}{(a^2-b^2)} = \frac{a(d+c)+b(d-c)}{(a^2-b^2)} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-2e052bd193e23e4cedcad922112e3734_l3.svg "Rendered by QuickLaTeX.com")
Обозначения: см. выше.
![\[ \boldsymbol{W_A} = \frac{ac+bd}{(a^2-b^2)} = \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-48b0ec44d1e0d42dabceb71cbfad8fef_l3.svg "Rendered by QuickLaTeX.com")
![\[ a^2-b^2 = \bigg(\frac{4P+Q}{4g}\bigg)^2 - \frac{Q^2}{16g} = \frac{16P^2+8PQ+Q^2-Q^2}{16g} = \frac{8P(2P+Q)}{16g} = \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-2cdd2ee66d6812a6fc07a598e6ce0463_l3.svg "Rendered by QuickLaTeX.com")
![\[ = \frac{P}{2g} \bigg(2P+Q\bigg). \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-739b2bd162857afceca8c60ea71cb6fb_l3.svg "Rendered by QuickLaTeX.com")
![\[ ac+bd = \frac{4P+Q}{4g} \cdot \frac{1}{2} (Q-2P) + \frac{Q}{4g} \frac{1}{2} (Q-2Pf) = \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-d26db64f7acfc2787047671eab8494db_l3.svg "Rendered by QuickLaTeX.com")
![\[ = \frac{1}{8g} \Big[ 4PQ-8P^2+Q^2-2PQ+Q^2-PQf \Big] = \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-0aafecba31969f54eb7d8a53f48ff382_l3.svg "Rendered by QuickLaTeX.com")
![\[ = \frac{1}{8g} \Big( 2Q^2+2PQ-8P^2-PQf \Big) \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-b1eb8266d734563410c22c3d86628ff2_l3.svg "Rendered by QuickLaTeX.com")
(20) 
6) Определить натяжение нити  :
:
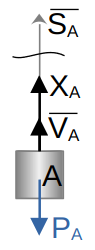 Запишем уравнение динамики поступательного движения тела
Запишем уравнение динамики поступательного движения тела
![\[ \begin{matrix} m_A \cdot W_A = \vert \overline S_a \vert - P_A \\ \frac{P_A}{g} W_A = \vert \overline S_a \vert - P_A ; & ( P_A=P, & m_A=\frac{P_A}{g} ). \\ \vert \overline S_a \vert = \frac{P_A}{g} W_A + P_A ; \end{matrix} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-1b88932a1d99bf3c1c071660c0720ebe_l3.svg "Rendered by QuickLaTeX.com")
подставляя в последнее уравнение значения  из (20) получим натяжение нити
из (20) получим натяжение нити
![\[ \begin{split} \boldsymbol{\vert \overline S_a \vert} = \frac{P(2Q^2+2PQ-8P^2-PQf)}{4P(2P+Q)} + P = \\ = \frac{2Q^2+2PQ-8P^2-PQf+2P^2+PQ}{4(2P+Q)} = \\ = \frac{2Q^2+3PQ-6P^2-PQf}{4(2P+Q)} ; \end{split} \]](https://tmath.spb.ru/wp-content/ql-cache/quicklatex.com-fc34ce829a783464f73db4db2a80d678_l3.svg "Rendered by QuickLaTeX.com")
Примечание: Условное направление вектора  выбрано верно, т.к. мы получили положительный ответ для модуля
выбрано верно, т.к. мы получили положительный ответ для модуля 